")
")
Final Event
After three exciting years, the final event of our research project UrbANT took place in november at ika.

Robots and Society – Finalizing the Technology Impact Assessment and Technology Transfer Analysis
The diffusion of new technologies is always accompanied by societal changes. The UrbANT project examined potential societal effects of delivery robots from two perspectives.
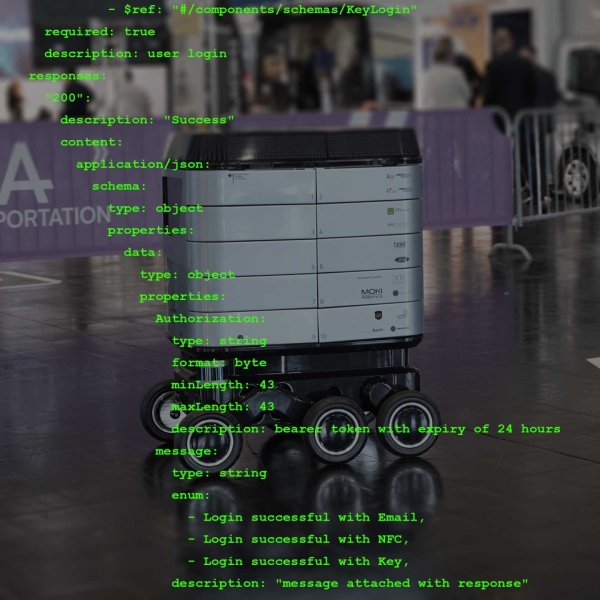
API development for smartphone app and parcel station
In the current project phase, neomesh GmbH was particularly involved in the further development of the API as well as the technical integration. The API was documented according to OpenAPI standard (swagger).
Assembled foldable body structure
The folding body structure developed within the scope of the project UrbANT, enables to transport larger items for example the luggage from airport or a plant from a nursery to one's door step.
![[Foto: Faltaufbau]](../images/news/faltaufbau/IMG_0083_1_1.png)
The assembly of the shopping structure begins
The UrbANT shopping set up simplifies shopping in urban areas in particular. With its help, users can transport their goods from the supermarket to their own front door or have them delivered completely autonomously.
