")
")
Motivation
![[Skizze: Problemstellung]](../images/motivation.jpg)
Many routes in cities can comfortably be covered by bicycle, on foot and by public transport. Especially shorter distances of less than one kilometre, which can be reached on foot in less than 15 minutes, and cycling distances of less than 10 km are already often covered without the use of a private car. A continuous expansion of the pedestrian and cycle path network as well as public transport services that are more frequent and the use of modern, low-emission buses in further support this.
However, if large or heavy goods have to be transported even over short distances, e.g. after a shopping trip, the private car still appears to be the necessary means of transport, even in urban areas. With new mobility concepts, however, alternatives can also be created for this.
Objectives
![[Skizze: Idee]](../images/idee.jpg)
The aim of the UrbANT research project is to develop three electrically driven micromobility devices that will provide an alternative to cars in urban areas. On the one hand, they will automatically follow pedestrians and allow for comfortable transport of large and heavy goods while interacting safely, reliably and intuitively with the user. On the other hand, UrbANT will move autonomously for example to get to their next destination or to act as an autonomous last-mile delivery system.
The micromobility devices navigate pavements at up to 6 km/h, carry up to 60 kg payload and can be used in non-barrier-free environments. Through their HMI interfaces, they communicate not only with their users, but also with passers-by around them.Research Topics
The main research fields in UrbANT are the interaction with primary and secondary users as well as passers-by, the development of the driving platform, its different hut structures and its design, the automation, the HMI and the vehicle back-end system. You can find more information on the individual research fields via the graphic and the tabs below.
![[Skizze: Gesamtsystem]](../images/UrbANT-Gesamtsystem-5e.svg)
Primary & secondary users
The involvement of users who have direct, volitional contact with the micromobility device (primary and secondary users) is an essential component of the ika-sided development and scientific support in the UrbANT project. The early involvement of these user groups is important in order to incorporate requirements and needs into the development process as early as possible. Within all studies, a methods-mix is used that enables the collection and evaluation of both qualitative and quantitative data. A total of six studies are planned within the project, which will be supplemented by (extracurricular) online studies:
As part of the ergonomics study, various UrbANT prototypes will be evaluated in comparison to a conventional shopping cart with regard to subjective and objective ergonomic design criteria. With the help of the study, ergonomically favorable concept elements will be identified and optimization potentials derived.
In four further studies, the interaction between the vehicle and the user (including the exchange of information via visual and/or auditory displays, follow-up behavior, etc.) is to be investigated in particular. Findings from these studies are to be incorporated into the interaction development. This includes not only the best possible calibration of the following function (including the following distance), but also the investigation and design of verbal and nonverbal interaction principles. The goal is to design a safe and pleasant interaction that contributes to an optimal calibration of trust on the part of the users.
The study series concludes with a final field test, in which the UrbANT prototypes are to be tested holistically in the field. This will not only evaluate individual functional components, but also holistic processes and the overall experience with the vehicle.
Interaction with passers-by
A micromobility device will not only encounter users. On its journeys through the city, along sidewalks and public places, the vehicle will primarily encounter uninvolved third parties. These people have not chosen themselves to interact, but suddenly find themselves in the presence of an autonomous delivery vehicle. The perspective of these passers-by must also be considered in the research. How does the micromobility device affect them? How do different people behave in such a situation? Which interaction strategies of the micromobility device can resolve these encounters?
In the UrbANT project, interaction with passers-by is considered in two main research areas. The first is collision avoidance. In field observations and experimental laboratory studies we look at how passersby react to autonomous micromobility devices. From that, we develop interaction concepts for passing situations. The second research focus concerns obstructive and aggressive behavior towards the micromobility device. Past field studies on robots in (partially) public spaces have repeatedly indicated that robots often are harassed and maltreated, especially by children. This phenomenon is referred to as "robot abuse" in the literature. Such incidents in which the micromobility device would be temporarily prevented from continuing its journey or even damaged, pose a risk both to the vehicle itself and to reliable delivery. The goal is therefore to develop and test possible concepts in field and laboratory studies to prevent or avert such abusive behavior.
© Laura Platte

© Laura Platte

© Anna Abrams
UrbANT Vehicle Platform
The vehicle platform forms the basis of all UrbANT micromobility device. All the hardware required for autonomous driving is integrated into it. In addition to the powertrain, chassis and vehicle structure, this includes the energy supply, sensor technology and vehicle intelligence. The integration of all components into the platform means that it is capable of driving on its own. This offers the advantage that the different hut structures can be designed more variably and highly cost-effectively.
Key design parameters for the driving platform are the compact external dimensions of less than 90 x 60 cm, which, in combination with the independent wheel drive, enables high manoeuvrability in narrow spaces, as well as good obstacle clearance, which allows for use in non-barrier-free environments due to large slope angles. This enables safe climbing over kerbs and driving on uneven and unpaved tracks, such as cobblestones or paths in parks.
Essential technical parameters of the vehicle are:
- Compact external dimensions: < 90 x 60 cm
- Top speed: 6 km/h
- Range & operating time: approx. 20 km & 4 h
- High payload: 90 kg (hut structure + payload)
- Applicable in non-barrier-free environments
Parcel station, folding hut and shopping hut
In the UrbANT project, three different hut structures are being developed that can be combined with the driving platform. The Institute for Automotive Engineering is developing the parcel station, the German Institutes for Textile and Fiber Research Denkendorf are responsible for the folding hut and the company easy2cool is designing the shopping hut.
Parcel station hut structure
The parcel station developed by the Institute for Automotive Engineering is used for the transport of courier, express and parcel shipments on the last mile and in inner-city direct shipments. Depending on the application, the parcel station can be loaded in inner-city micro-depots or at a transfer point from a delivery van or, as a supplement to bicycle couriers, transport courier and express shipments from A to B in the city. This also makes same day deliveries for local retailers possible and offers an alternative to online shopping.
Despite its small footprint of less than 90 x 60 cm, the parcel station can transport ten parcels the size of a file folder. In order to flexibly transport larger parcels as well, several compartments on top of each other can be combined.
In addition to delivering parcels and packages to the front door – at the time of day or night requested by the customer – the UrbANT Parcel Station can also be used to post returns. The parcels are handed in and out via the vehicle's HMI or the newly designed smartphone app.


Folding hut structure
DITF develop various strategies for the production of individual components of the flexible superstructure. To meet the lightweight requirements for increasing the vehicle's payload, a telescopic body using composite sandwich construction is developed. The stability of the superstructure is ensured by using relatively stiff GFRP floor module manufactured using vacuum assisted resin infusion (VARI) process. The floor module integrates the data processing and control electronics modules that are required for the user communication.
In addition, an innovative manufacturing concept based on the tape-laying process, in collaboration with the Institute for Textile and Fiber Technologies (ITFT) - University of Stuttgart, is developed for manufacturing carbon fiber-reinforced thermoplastic flexible roll-up door. The door ensures the ergonomic loading and unloading of the baggage into the UrbANT. The cover module, which is also manufactured using VARI process, integrates the cameras that assist autonomous driving and the user interaction components such as display, microphone and loudspeakers.
A unique scissor table mechanism integrated within the superstructure enables its infinitely variable height adjustment through which the useable volume of the UrbANT can be varied to suit the size of the payload.


Shopping hut structure
Due to its expertise in the field of passive cooling and food transport, easy2cool GmbH is responsible for the concept and design of the shopping hut structure. The aim is to transport a common purchase of goods from the place of purchase or storage to the end user's home within a time window of 4 to 6 hours in a food-friendly manner. Two separate compartments can be used to separate heavy beverage crates from fresh and frozen food.
Insulation systems for refrigerated shipping were usually made of expanded polystyrene (EPS) and plastic. Due to the high energy requirements during production and the enormously problematic disposal, this creates an immense burden on the climate, water and soil. The solution: a new, sustainable insulation material, which was developed together with the TU Dresden (Institute for Natural Materials Technology) as part of a ZIM R&D cooperation project. This sustainable insulation material made of cellulose is defibrated, then shaped into mats and integrated into the structure. Various test scenarios are simulated in climate chambers to develop the most effective and efficient cooling solution. The development takes into account external parameters such as the specified size of the UrbANT vehicle and the other components to be accommodated, such as man-machine interfaces.


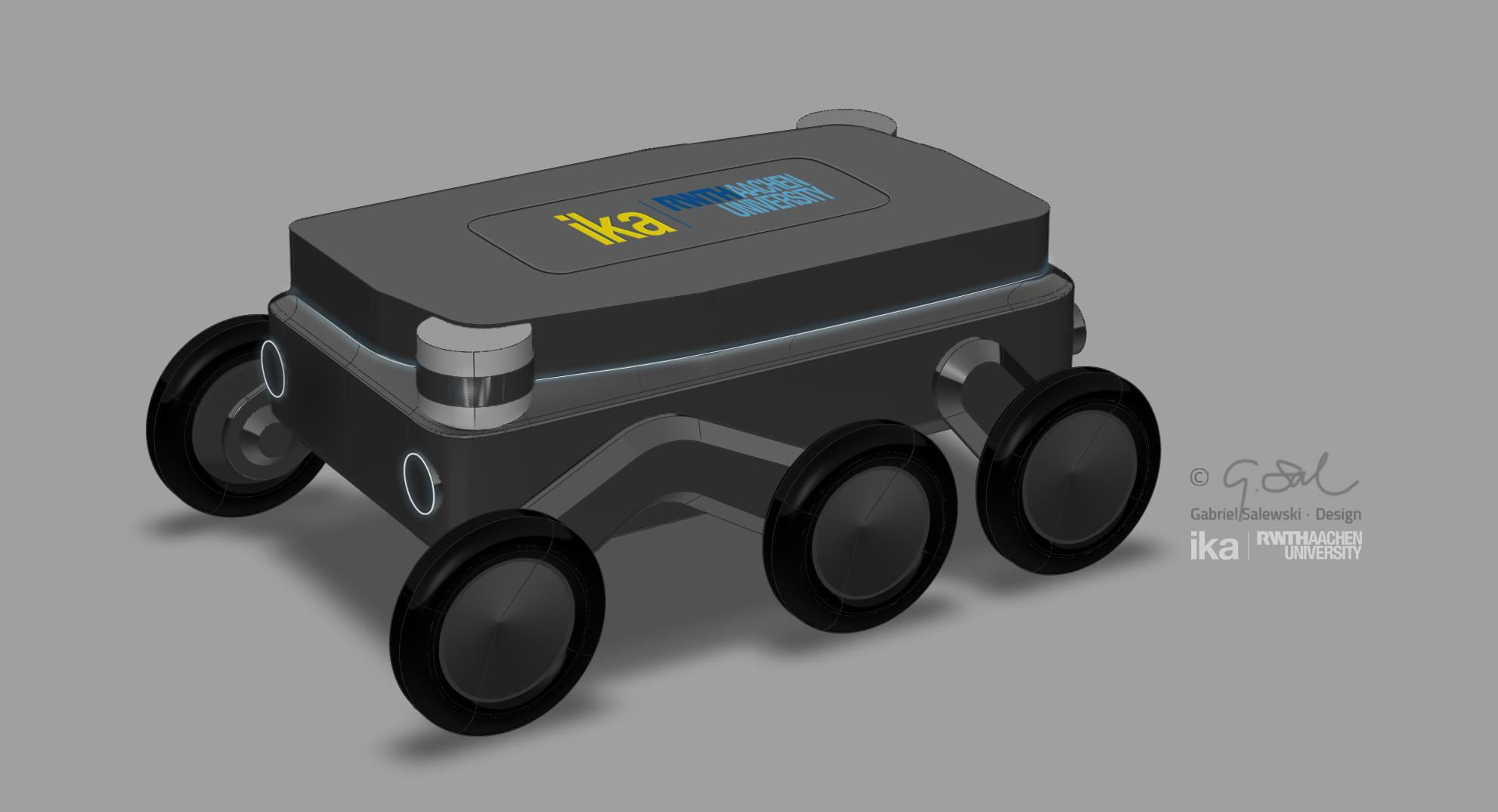
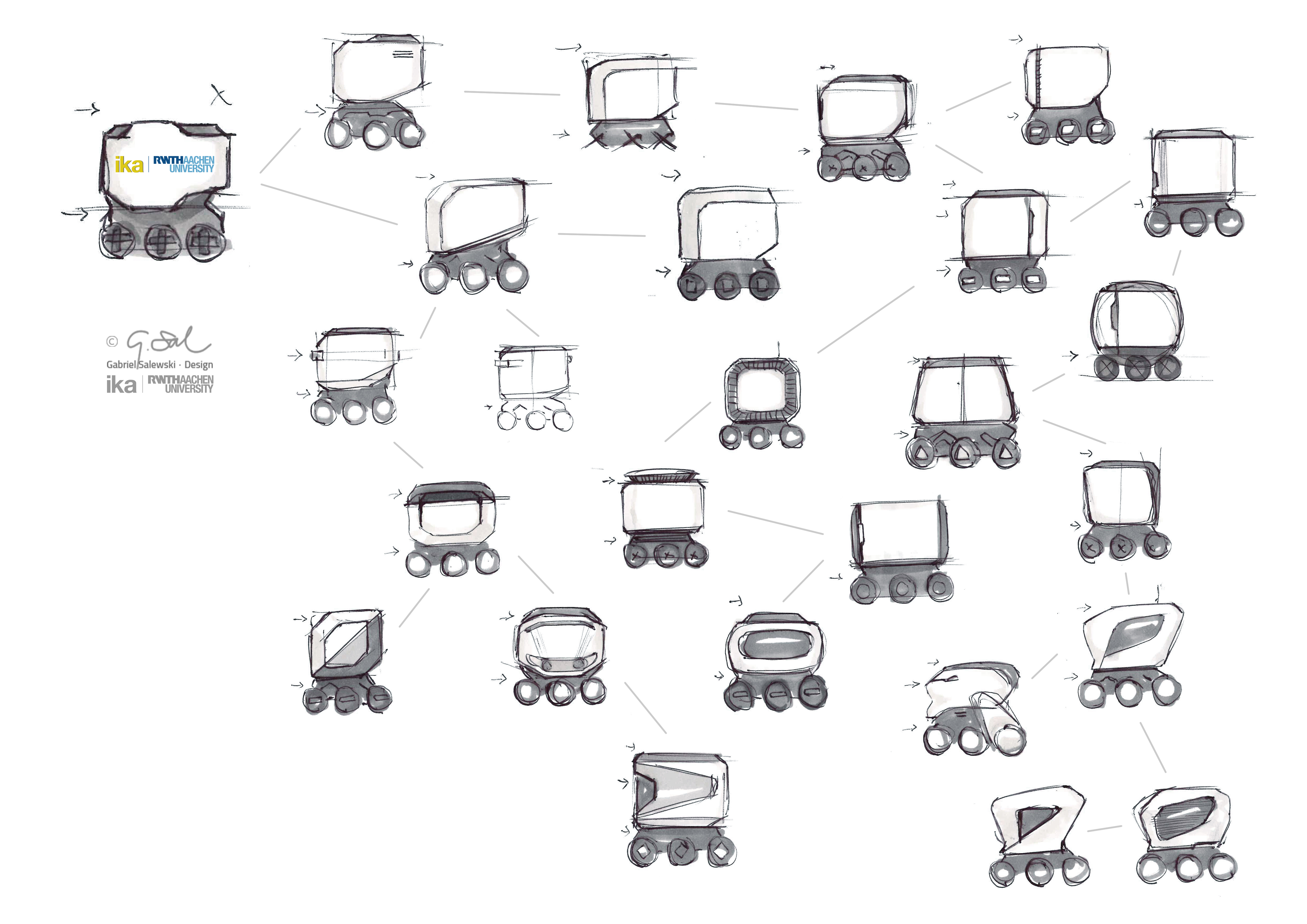
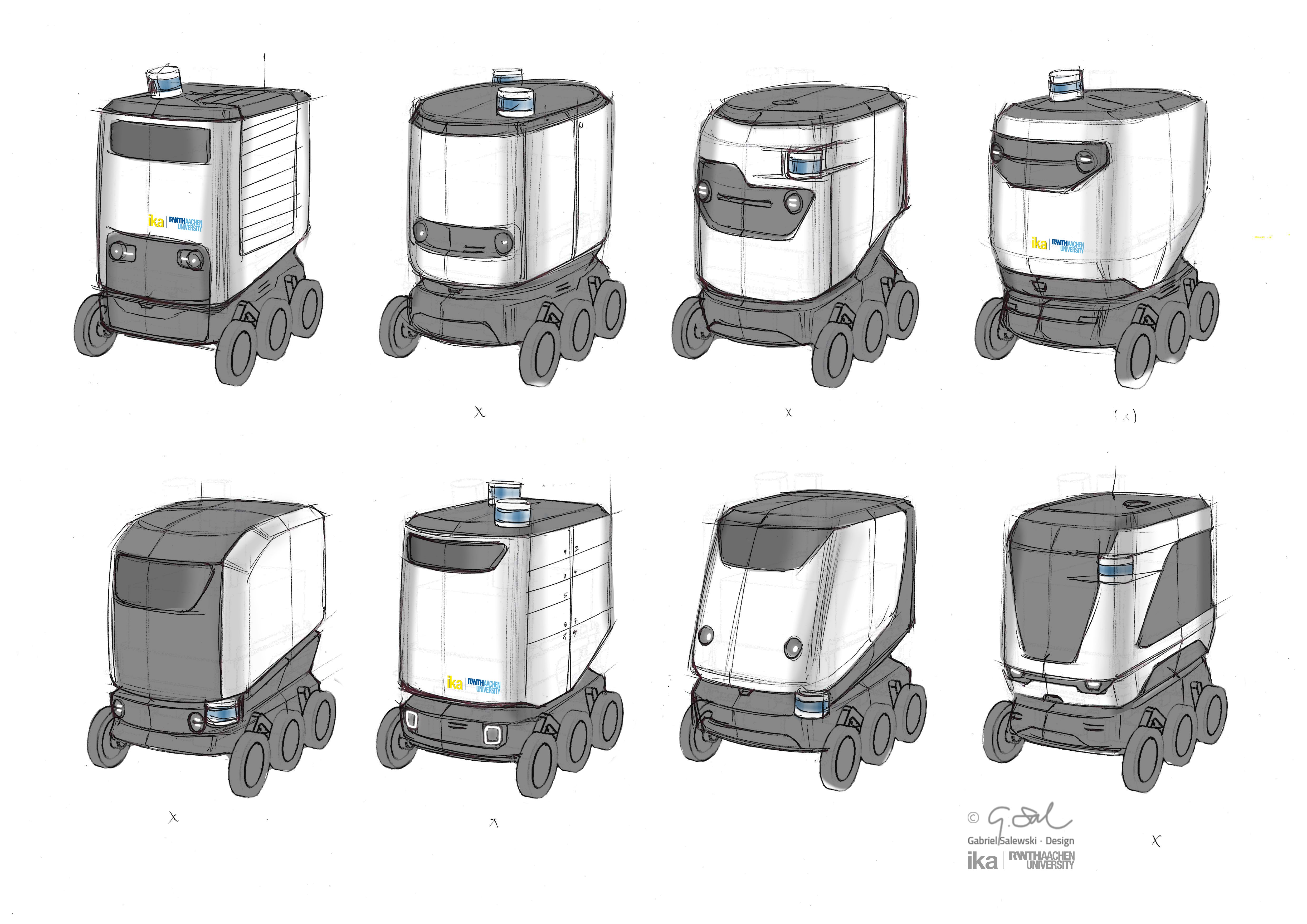
Exterior Design
With the presentation of the exterior design, UrbANT gets its face for the first time. Together with the project partners, the transportation designers at ika have developed the design of the platform as well as the shopping-, folding- and parcel station huts since summer 2019, which is continuously growing via mould construction to the finished vehicle. The design process started with a blank sheet of paper. In the concept phase, sketches were made in order to visualize different ideas and find balanced proportions.
In coordination with the engineering process, a more detailed design language was developed based on the given basic dimensions of the vehicle. The first digital 2D renderings were made to get a realistic impression of the micromobility devices and to develop a design language. The level of detail increased in coordination with the project partners for all three hut structures under consideration of HMI, package, structre and sensor technology.
The design freeze in autumn 2020 defined the further styling process and the detaileed exterior surface design started. During this phase, the entire optical outer skin of the UrbANT was created. The designed exterior surfaces are currently being incorporated into the overall data CAD model. In parallel, a first 1:1 prototype is created for assessing optical surfaces and selected exterior colors. Through several iteration loops, the exterior design will be developed to its final shape over the next few months and soon be visible on the UrbANT prototypes.




System automation
Within the project, the development and integration of a following function as well as the autonomous navigation of the micromobility device in urban environments will be carried out. By means of the following function to be developed, the micromobility device will be able to follow a user autonomously (e.g., carrying groceries home) while actively avoiding surrounding traffic. With the autonomous navigation function, the micromobility device will be able to cover distances automatically without a user. The sensor technology used will enable the micromobility device to fully detect its surroundings and thus to perceive obstacles such as people and avoid them.
The user-following function comprises subcomponents consisting of a detection function for user recognition, a tracking function for tracking and unambiguously recognizing the user in passenger traffic, and integration into the motion path planning with collision avoidance.
Within the automation functions there is the implementation of functions for environment mapping and localization including heterogeneous sensor data. Furthermore, semantic segmentation methods are used to classify areas that can be traversed, among other classifications (like signal lights). The route and motion path planning of the robot is performed within a global route finding (e.g. Open-Street Map (OSM) data is integrated here) and local trajectory planning, which also integrates collision avoidance. A state machine combines these components to execute driving and delivery tasks.
The sensor systems integrated into the driving platform include mono cameras, stereo vision systems, inertial measurement units (IMUs), 3D lidar sensors and ultrasonic sensors.

![[Rendering: HMI Concept]](../images/projekt/17_2020_07_20_eHMI_Design_front_5_-_CamerasReflektoren_V3_-_1.jpg)
Human-Machine Interaction
An important aspect of the usercentred transportation platform is the development of the tailor-made human-machine interaction. The holistic HMI concept includes the interaction with the primary user, who orders and uses the vehicle on-demand, the secondary users, who are stakeholders in the design of the vehicle and are responsible for operating conditions, as well as indirectly involved third parties and pedestrians, who are encountered by the vehicle on the shared space sidewalk.
The goal of the research and development is to design an intuitive system that motivates the use while providing a low barrier to entry for the new technology.
In order to also offer older people an everyday assistance, the vehicle can be conveniently controlled both with the UrbANT app but also alternatively purely via touchscreen operation directly on the vehicle. The focus here is on designing an intuitive and user-friendly operating interface that reduces technical complexity and eliminates fear of contact, especially for older people.
Time schedule
The UrbANT project has a duration of 36 months. The project officially started on 15 May 2019 and will end on 14 May 2022.
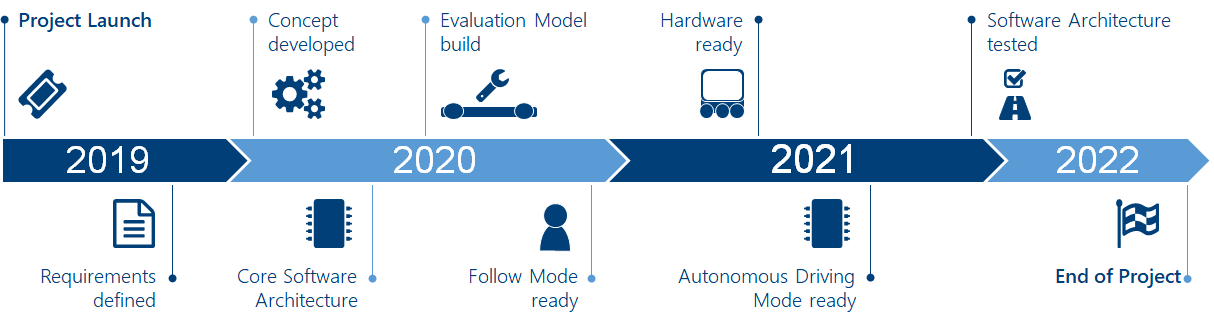
In the process of the project, seven iterative studies with users and passers-by will be carried out and the results integrated into the further technical development. At the end of the project, an extensive field test will take place.
