")
")
Photo session - UrbANT parcel station sighted during testing
With the completion of the parcel station, UrbANT is now in its final form. After its successful rollout and presentation at LogiMAT, the robot will be ready for further testing and interaction studies with users in the coming months.

UrbANT prototype with parcel station setup presented for the first time during LogiMAT fair
During the logistics and SME trade fair LogiMAT, which took place at the beginning of June, the UrbANT consortium presented the first of the three final robot prototypes in combination with the parcel station to interested visitors for the first time. In many exciting talks, ika, BE-Power and MOKI Robotics explained the motivation and concept for the research project to the international audience.

Parcours study
In a recent study, ika and Institut für Unternehmenskybernetik e. V. investigated how participants navigate together with UrbANT through a course in order to better understand how potential users solve possible challenges on the sidewalk with UrbANT.

Field Study Conducted to Investigate Typical Interactions with Pedestrians
What happens, if autonomously driving delivery robots are driving at the footpath? How do pedestrians react? In Autumn and Winter 2021/22 the Chair Individual and Technology (iTec) conducted a study to investigate typical interactions between pedestrians an autonomously driving delivery robots.

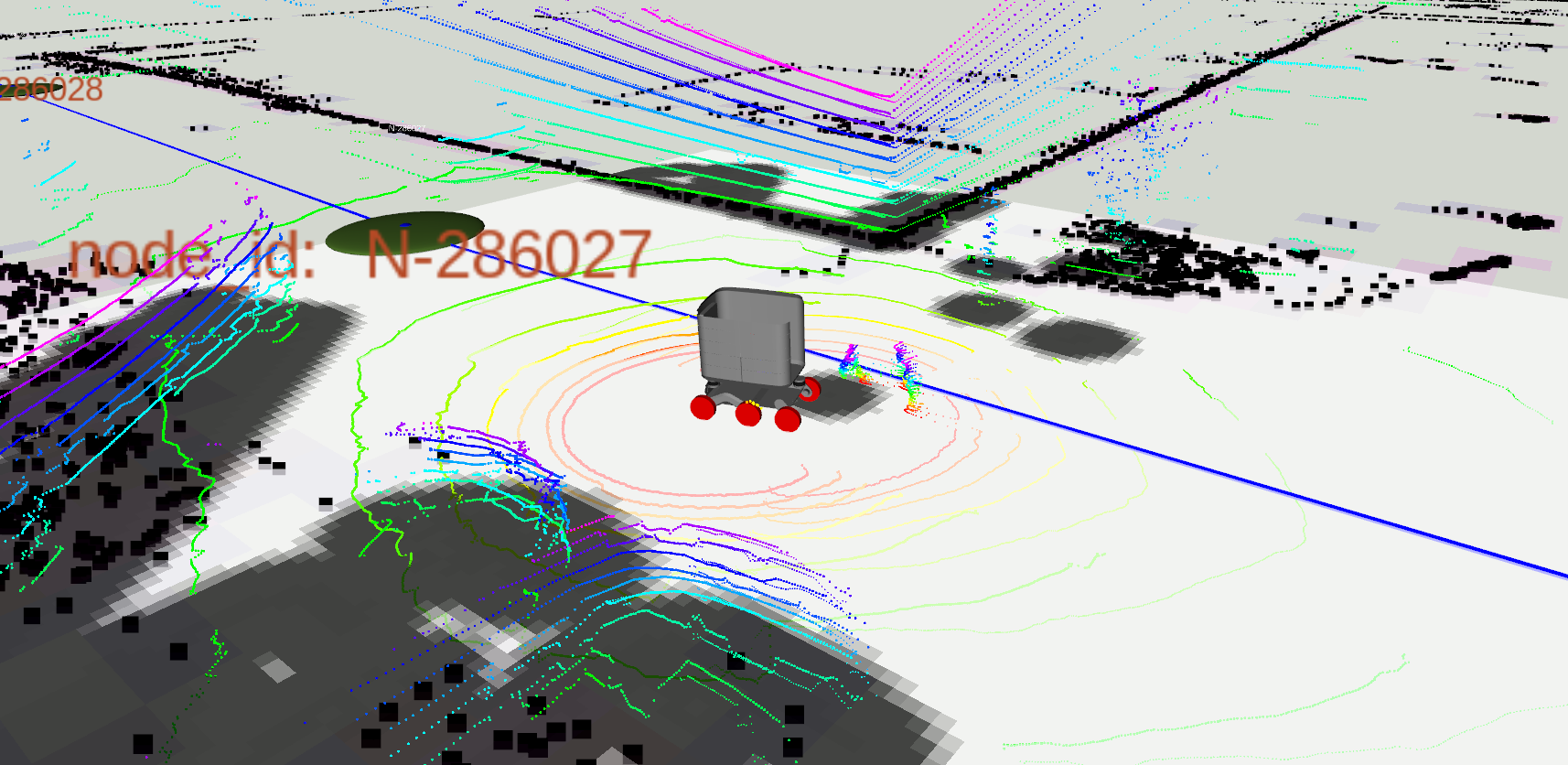
Localization and path planning in urban space
Localizing a robot in an urban environment is not as trivial as might be assumed. Everyone carries their GPS-enabled smartphone in their pocket every day and can be conveniently navigated from A to B. When used in urban areas, the GPS signal is reflected by the surrounding buildings.