")
")
![[Image: UrbANT Skizzen]](../images/titelbild.jpg)
Project
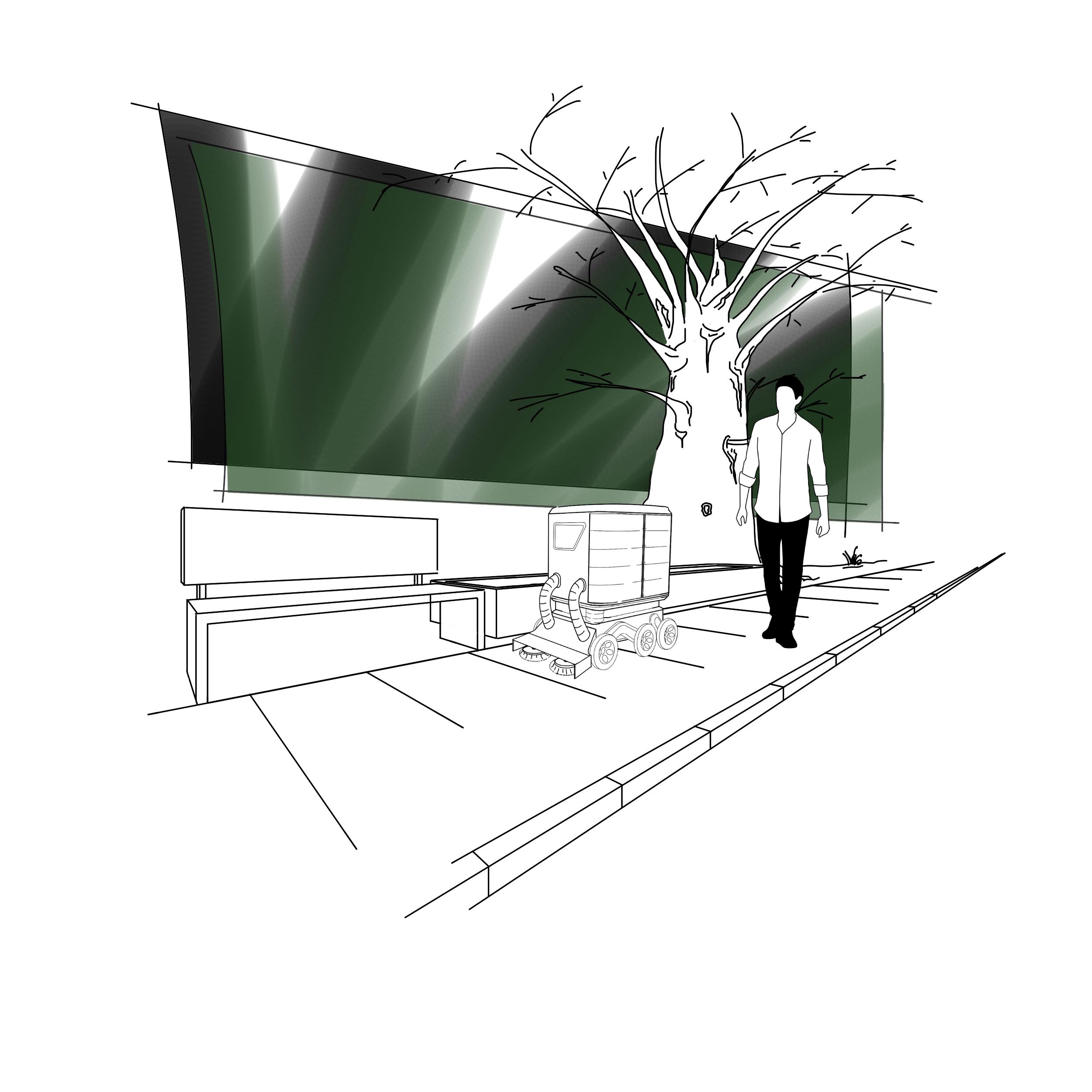
![[Bild: Konzept des Transporters]](../images/projektvorstellung.jpg)
Many distances in cities can comfortably be covered by bicycle, on foot and by public transport. However, if large or heavy goods need to be transported, using a car often seems unavoidable.
In the UrbANT research project, whose acronym stands for the development of an urban, automated, user-oriented (in German “nutzerorientiert”) transport platform, ten research and industry partners from Germany are designing, manufacturing and testing three electrically driven micromobility devices that travel at up to 6 km/h on pavements. On the one hand, UrbANT will allow pedestrians to comfortably transport large and heavy goods while interacting safely, reliably and intuitively with the user as well as following them automatically. On the other hand, UrbANT will move autonomously to reach its next destination on their own or act as an autonomous last mile delivery system. Three different hut structures enable the transport of different goods, from small packages over bulky suitcases to groceries, while the vehicles communicate with their users and passers-by via a newly developed HMI system.
All information about the project and its research topics, current news and publications as well as an overview of the partners can be found on this page.
News
Here you can find the latest news about the UrbANT project. You can find more articles by clicking on the button below.

Final Event
After three exciting years, the final event of our research project UrbANT took place in november at ika.
Tuesday, 06 December 2022
Robots and Society – Finalizing the Technology Impact Assessment and Technology Transfer Analysis
The diffusion of new technologies is always accompanied by societal changes. The UrbANT project examined potential societal effects of delivery robots from two perspectives.
Wednesday, 23 November 2022
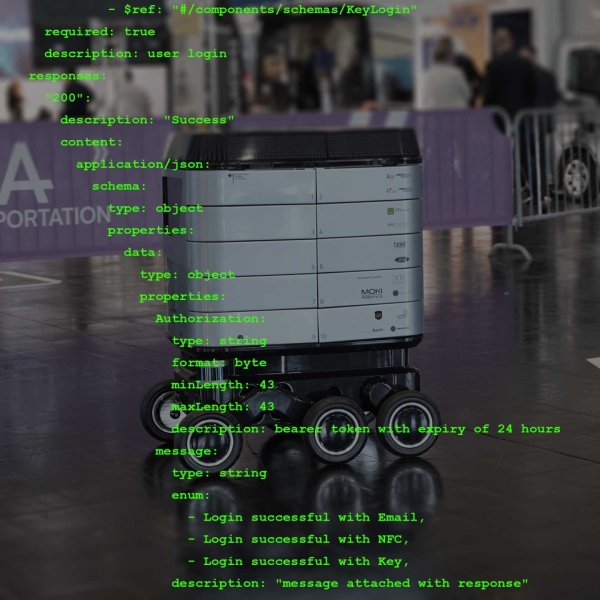
API development for smartphone app and parcel station
In the current project phase, neomesh GmbH was particularly involved in the further development of the API as well as the technical integration. The API was documented according to OpenAPI standard (swagger).
Friday, 14 October 2022
Publications
Here you can find the latest publications on the UrbANT project. Click on the button below for an overview of all publications.
Investigation of different communication strategies for a delivery robot: the positive effects of humanlike communication styles 2021-08-08 – 2021-08-12
30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Vancouver, Kanada,Authors: P.S.C. Dautzenberg (M. Sc.), Institut für Kraftfahrzeuge (ika); Dr. phil. G.M.I. Voß, Institut für Kraftfahrzeuge (ika); Dr. phil. S. Ladwig, Institut für Kraftfahrzeuge (ika); Univ.-Prof. Dr. rer. nat. A. M. Rosenthal-von der Pütten, Lehrstuhl für Technik und Individuum (iTec)
Im Rahmen der 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN) präsentierte und diskutierte das ika die Ergebnisse einer Onlinestudie im Rahmen eines Vortrags sowie einer Publikation. Ziel der Studie war die subjektive Evaluation N = 9 verschiedener Kommunikationsstrategien hinsichtlich der nutzerseitig wahrgenommenen Kompetenz, Wärme, Komforts und Präferenz. Bezüglich der Kommunikationsstrategien wurde u.a. der Grad des Anthropomorphismus, das Geschlecht sowie die Modalität variiert.
A Theoretical and Empirical Reflection on Technology Acceptance Models of Autonomous Delivery Robots 2021-03-09 – 2021-03-11
ACM/IEEE International Conference on Human-Robot Interaction (HRI), Boulder, Colorado, USAAuthors: Anna Abrams, Pia Dautzenberg, Carla Jakobowsky, Stefan Ladwig, Astrid Rosenthal-von der Pütten
In diesem Artikel werden aktuelle Technikakzeptanzmodelle, die den Fokus auf Nutzungsszenarien legen, vor dem Hintergrund autonomer Liefermodelle hinterfragt. Die Autorinnen und Autoren entwickeln das Konzept der Existenzakzeptanz (Existence Acceptance), das die Technikakzeptanz von zufällig anwesenden Personen betrachtet. Das Model wird in einer Online-Studie empirisch getestet und theoretisch diskutiert.
In this paper, current technology acceptance models with their focus on a use scenario are questioned for autonomous delivery models. The authors develop the concept of Existence Acceptance (EA) that addresses the technology acceptance of incidentally co-present persons. The model is empirically tested in an online study and theoretically discussed.
User-oriented transport solutions: An ergonomic investigation of two novel concepts 2021-07-25 – 2021-07-29
12th International Conference on Applied Human Factors and Ergonomics (AHFE 2021), New York, USAAuthors: Pia Dautzenbeg, Gudrun Voß, Lining Wand, Martin Reske, Christopher Brockmeier, Stefan Ladwig
Im Rahmen der 12th International Conference on Applied Human Factors and Ergonomics (AHFE 2021) wird das ika die im August 2020 durchgeführte Ergonomiestudie im Rahmen eines Vortrags sowie einer Publikation präsentieren und im wissenschaftlichen Plenum diskutieren. Ziel der Studie war die Evaluation subjektiver und objektiver Ergonomie bei der Nutzung von verschiedenen UrbANT Prototypen zur Identifikation ergonomisch günstiger Konzeptelemente und Ableitung von Optimierungspotentialen.
The ika will present the ergonomics study conducted in August 2020 at the 12th International Conference on Applied Human Factors and Ergonomics (AHFE 2021). The aim of the study was to evaluate subjective and objective ergonomics during the use of different UrbANT prototypes in order to identify ergonomically favorable concept elements and to derive optimization potentials.
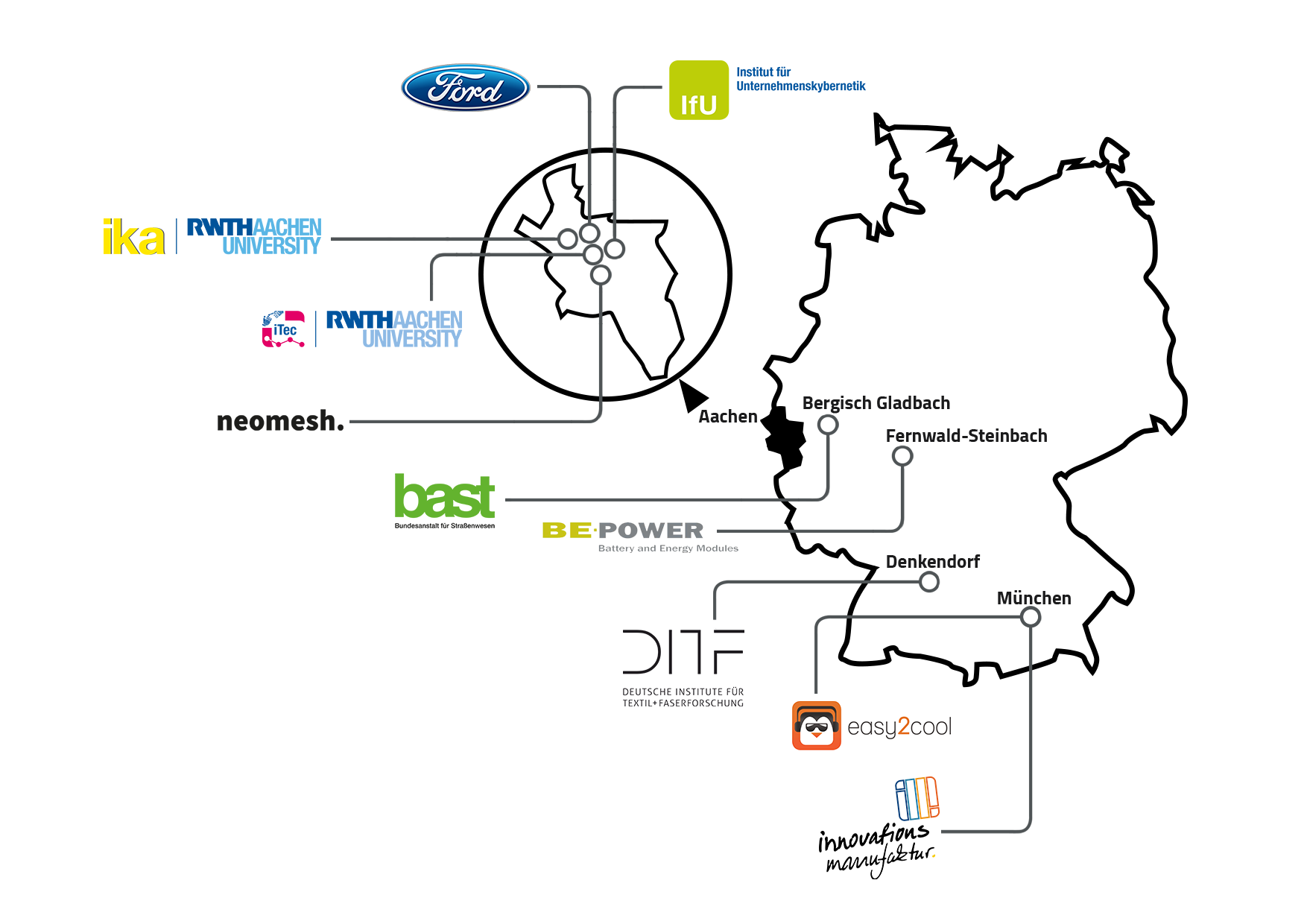
Partners
The UrbANT consortium consists of ten German research institutes and industry partners. Detailed information about all partners and their tasks in the project can be found by clicking on the logos and the button below.