")
")
Localizing a robot in an urban environment is not as trivial as might be assumed. Everyone carries their GPS-enabled smartphone in their pocket every day and can be conveniently navigated from A to B. When used in urban areas, the GPS signal is reflected by the surrounding buildings.
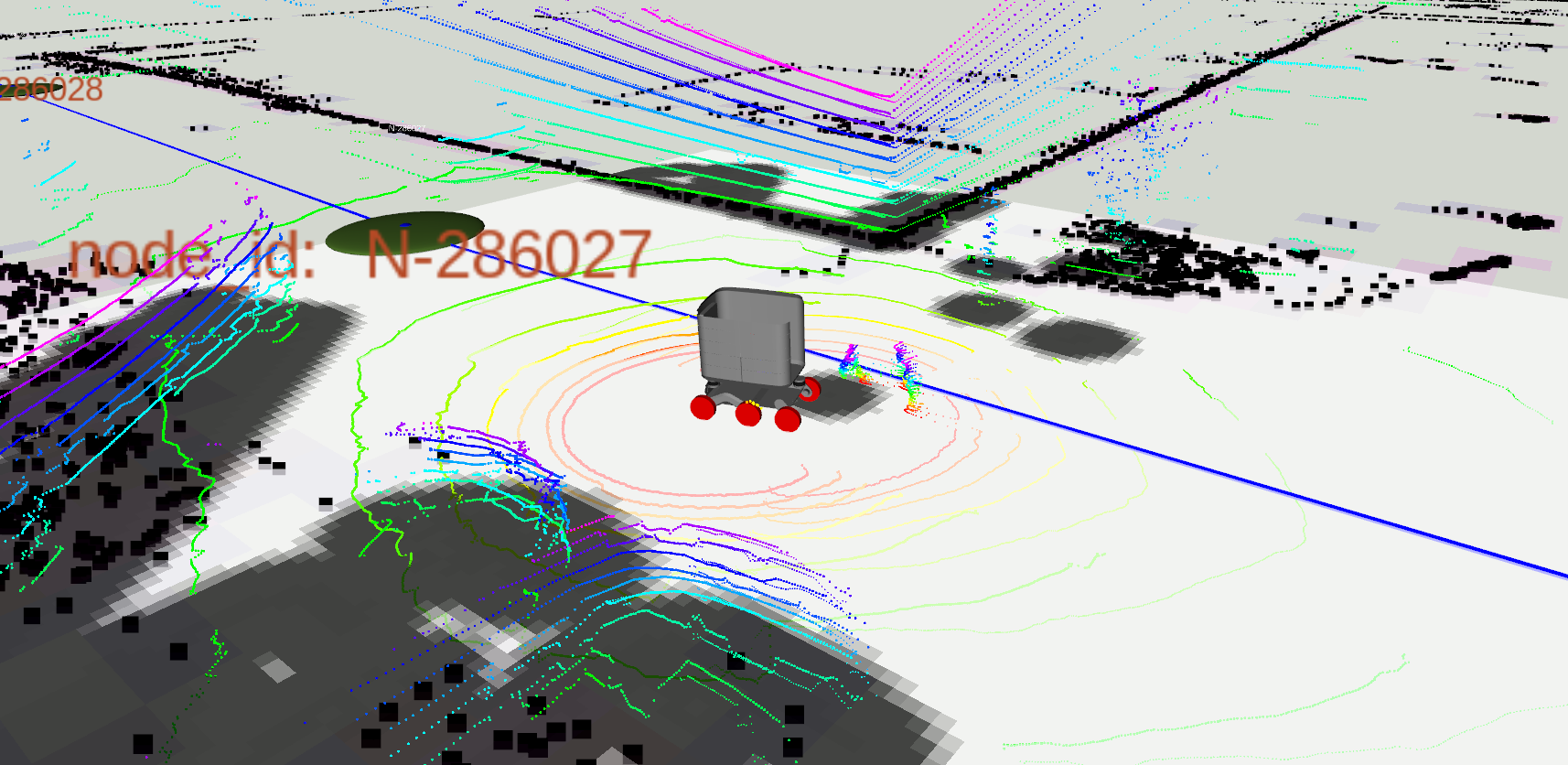
This leads to an increase in the signal's travel time and a degradation in localization quality. As a result, precise trajectory planning by the mobile robot system on sidewalks cannot be performed with sufficient accuracy. Therefore, UrbANT uses complementary methods to compensate for the GPS error. For this purpose, so-called SLAM methods are used. "SLAM" means "Simultaneous Localization And Mapping." With the help of 3D lasers, point clouds are recorded, which are compared with each other. The measured displacement allows conclusions to be drawn about the initial position. The resulting high-resolution maps (a.k.a. "HD maps") can be uploaded to all vehicles in the fleet after mapping, so that they can be located accordingly.
In order to plan the fastest path, well-known path planning methods, such as the A* algorithm, are often applied in robotics to 2D maps in the pixel plane. When transferring this method to the 3rd dimension of a large map, it would take a much longer computation time. For this reason, simplified node meshes are placed on the HD maps recorded with SLAM. For this purpose, the OpenStreetMap project serves as an initial source for extracting sidewalk information. These are then manually optimized and refined. UrbANT has a real-time obstacle detection and can avoid dynamic objects in space to successfully follow the planned route. To ensure that the vehicle remains on the sidewalk, a neural network detects the sidewalk in the camera image.
We will publish how this looks in action at a later date.
https://ifu.rwth-aachen.de/
https://www.youtube.com/channel/UCrhLvtGRBEAHQwWLRbMNp-g