")
")
Abschlussevent
Nach drei spannenden Jahren fand Ende November das Final Event unseres Forschungsprojektes UrbANT am ika statt.

Roboter und Gesellschaft – Finalisierung der Technikfolgenabschätzung und Technologietransferanalyse
Die Verbreitung neuer Technologien geht immer mit gesellschaftlichen Veränderungen einher. Im Projekt UrbANT werden potenzielle gesellschaftliche Effekte von Lieferrobotern aus zwei Perspektiven beleuchtet.
API-Entwicklung für Smartphone-App und Paketaufbau
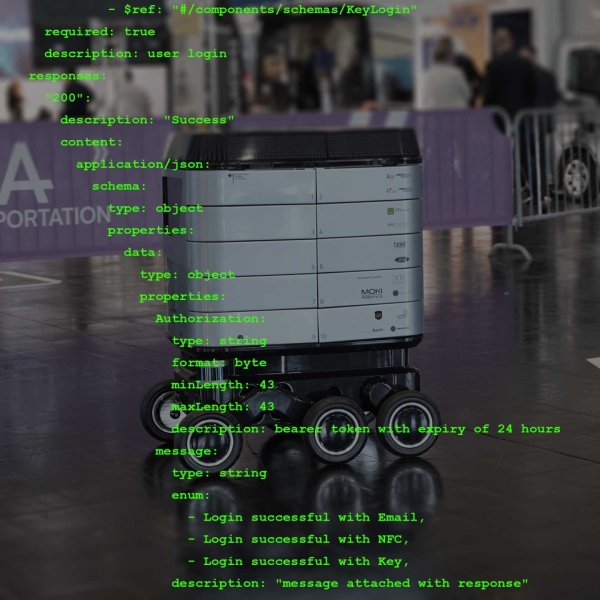
In der aktuellen Projektphase hat sich die neomesh GmbH insbesondere mit der Weiterentwicklung der API sowie der technischen Integration beschäftigt. Die API wurde nach OpenAPI-Standard (Swagger) dokumentiert.
Montage des Faltaufbaus
Der im Rahmen des Projekts UrbANT entwickelte Falthutaufbau ermöglicht es, größere Gegenstände wie z.B. das Gepäck vom Flughafen oder eine Pflanze aus der Gärtnerei bis vor die Haustür zu transportieren.
![[Foto: Faltaufbau]](../images/news/faltaufbau/IMG_0083_1_1.png)
Die Montage des Einkaufsaufbaus beginnt
Mit dem UrbANT-Einkaufsaufbau wird speziell das Einkaufen im urbanen Raum vereinfacht. Mit seiner Hilfe können Nutzer ihre Waren vom Supermarkt bis an die eigene Haustür transportieren oder sich diese vollkommen autonom liefern lassen.
