")
")
Die Lokalisierung eines Roboters im urbanen Umfeld ist nicht so trivial, wie vermutet werden könnte, denn schließlich trägt jeder täglich sein GPS-fähiges Smartphone mit sich in der Hosentasche und kann sich so bequem von A nach B navigieren lassen. Das GPS-Signals wird beim Einsatz im urbanen Raum durch die umliegenden Gebäude reflektiert.
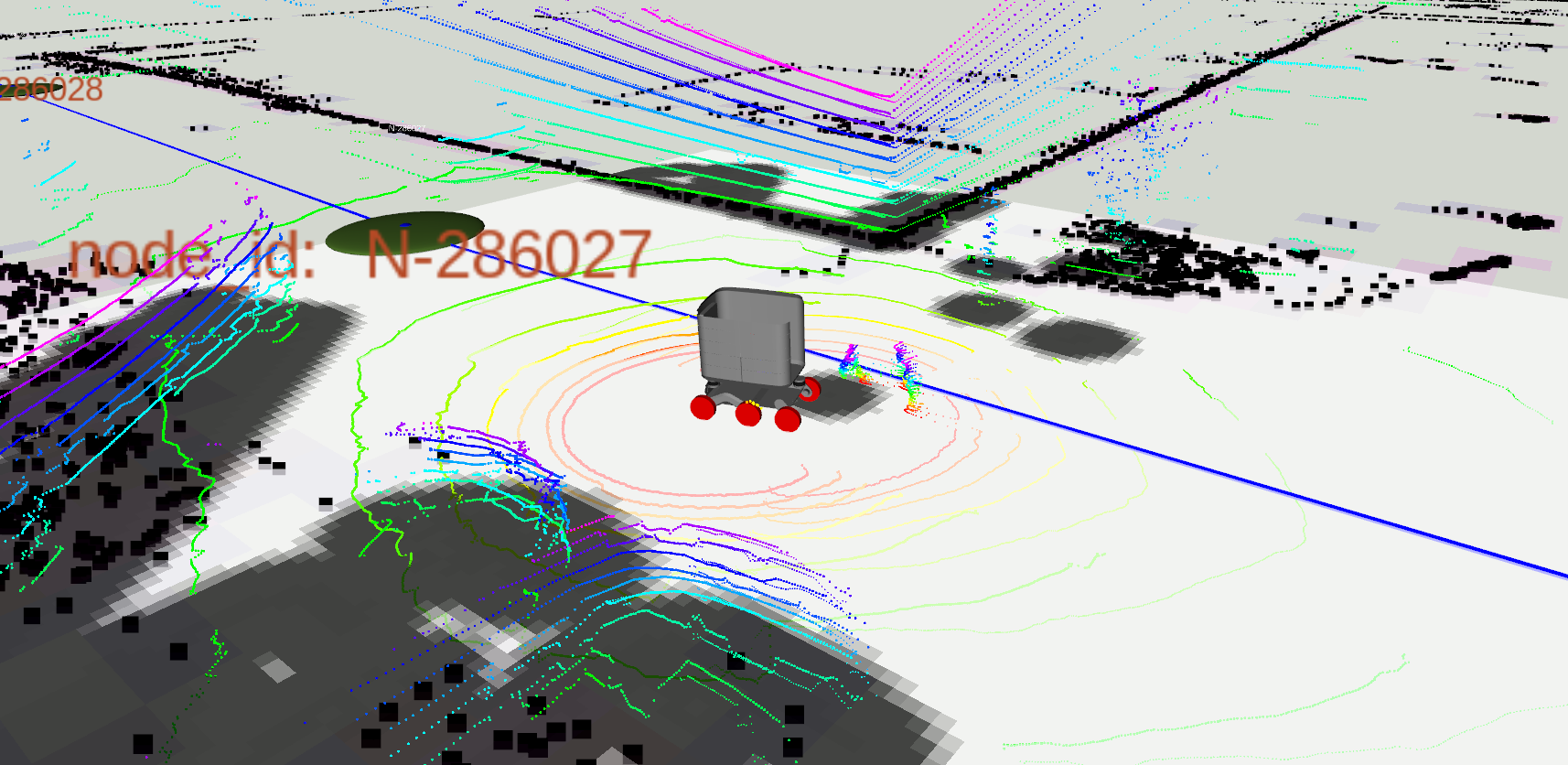
Dies führt zu einer Laufzeitverlängerung des Signals und einer Verschlechterung der Lokalisierungsgüte. Hierdurch kann keine präzise Trajektorien-Planung durch das mobile Robotersystem auf Bürgersteigen hinreichend genau durchgeführt werden. Deshalb nutzt UrbANT ergänzende Methoden, um den GPS-Fehler auszugleichen. Hierzu kommen sogenannte SLAM-Methoden zum Einsatz. „SLAM“ steht für „Simultaneous Localization And Mapping“. Mit Hilfe von 3D-Lasern werden Punktwolken aufgezeichnet, welche miteinander verglichen werden. Durch die gemessene Verschiebung lassen sich Rückschlüsse auf die initiale Position schließen. Die hieraus gewonnen hochaufgelösten Karten (ugs. „HD-Maps“) können nach der Kartierung auf allen Fahrzeugen der Flotte aufgespielt werden, um sich entsprechend lokalisieren zu können.
Um den schnellsten Weg zu planen, werden bekannte Methoden der Pfadplanung, wie der A*-Algorithmus, in der Robotik oft auf 2D-Karten in der Pixelebene angewendet. Bei der Übertragung dieser Methode auf die 3. Dimension einer großen Karte würde diese eine deutlich längere Rechenzeit in Anspruch nehmen. Aus diesem Grund werden vereinfachte Knotennetze auf die mit dem SLAM aufgezeichneten HD-Maps gelegt. Hierzu dient das OpenStreetMap-Projekt als initiale Quelle zur Extraktion von Gehwegs-Informationen. Diese werden anschließend händisch optimiert und verfeinert. UrbANT besitzt eine Echtzeit-Hinderniserkennung und kann dynamische Objekte im Raum umfahren, damit die geplante Route erfolgreich abgefahren werden kann. Damit hierbei das Fahrzeug auf dem Gehweg bleibt, detektiert ein neuronales Netz den Gehweg im Kamerabild.
Wie das dann im Einsatz aussieht werden wir zu einem späteren Zeitpunkt veröffentlichen.
https://ifu.rwth-aachen.de/
https://www.youtube.com/channel/UCrhLvtGRBEAHQwWLRbMNp-g