")
")
Motivation
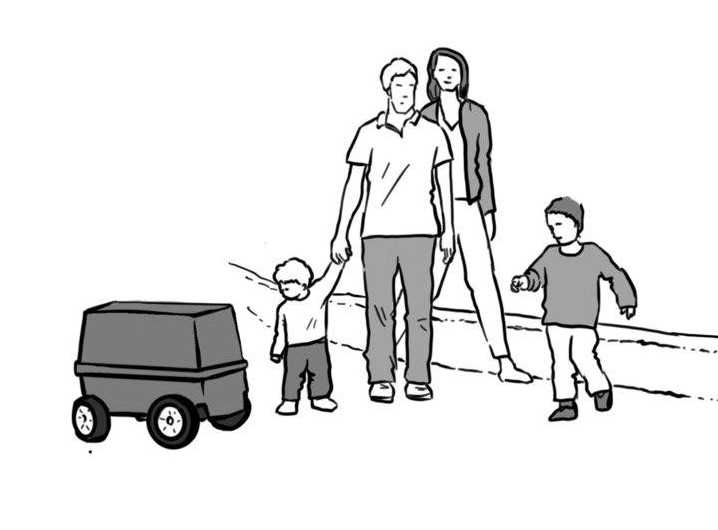
![[Skizze: Problemstellung]](../images/motivation.jpg)
Mit dem Fahrrad, zu Fuß und mit öffentlichen Verkehrsmitteln können in Städten viele Wegstrecken bequem zurücklegt werden. Gerade nähergelegene Ziele in unter einem Kilometer Entfernung, die zu Fuß in weniger als 15 Minuten erreicht werden können, und Fahrradstrecken unter 10 km werden bereits heute oftmals ohne den eigenen Pkw zurückgelegt. Ein kontinuierlicher Ausbau des Fuß- und Radwegenetzes sowie Taktverdichtungen und der Einsatz moderner, emissionsarmer Busse im ÖPNV, unterstützen dies weiter.
Müssen jedoch selbst auf kurzen Strecken große oder schwere Güter transportiert werden, z.B. nach einem Einkauf, erscheint auch im urbanen Raum das eigene Auto weiterhin als das erforderliche Transportmittel. Mit neuen Mobilitätskonzepten können jedoch auch hierfür Alternativen geschaffen werden.
Zielsetzung
![[Skizze: Idee]](../images/idee.jpg)
Ziel des Forschungsprojekts UrbANT ist die Entwicklung dreier elektrisch angetriebener Mikromobile, die eine Alternative zum Pkw in Innenstädten darstellen sollen. Sie werden einerseits zu Fuß Gehenden automatisch folgen und eine komfortable Beförderung großer und schwerer Güter erlauben und dabei sicher, zuverlässig und intuitiv mit den Nutzenden interagieren. Andererseits werden sich die UrbANT autonom fortbewegen, um eigenständig zu ihren nächsten Aufträgen zu gelangen oder als autonomes Liefersystem auf der letzten Meile zu fungieren.
Die Mikromobile befahren dabei Gehwege mit bis zu 6 km/h, transportieren bis zu 60 kg Zuladung und sind in nicht-barrierefreien Umgebungen einsetzbar. Durch verschiedene Mensch-Maschine-Interaktionsschnittstellen (engl. Human-Machine Interaction, HMI) kommunizieren sie dabei nicht nur mit den Nutzenden, sondern auch mit Passant*innen um sie herum.
Forschungsthemen
Wesentliche Forschungsthemen in UrbANT sind die Interaktion mit Primär- und Sekundärnutzenden sowie Passant*innen, die Entwicklung der Fahrplattform, deren Aufbauten sowie des Designs, der Automatisierung, des HMI und des Fahrzeug-BackEnd. Nähere Informationen zu den einzelnen Forschungsthemen erhalten Sie über die Grafik sowie über die Reiter unterhalb dieser.
Primär- und Sekundärnutzende
Die Einbindung der mit dem Mikromobil in direktem, volitionalem Kontakt stehenden Nutzenden (Primär- und Sekundärnutzende) ist wesentlicher Bestandteil der ika-seitigen Entwicklung und wissenschaftlichen Begleitung im Rahmen des Projekts UrbANT. Die frühzeitige Einbindung dieser Personengruppen ist wichtig, um Anforderungen und Bedürfnisse möglichst früh in den Entwicklungsprozess einfließen zu lassen. Dazu werden innerhalb des Projekts insgesamt sechs Studien durchgeführt, die durch Onlinestudien ergänzt werden. Bei allen Studien wird auf einen Methoden-Mix zurückgegriffen, der die Erhebung und Auswertung sowohl qualitativer als auch quantitativer Daten ermöglicht.
Im Rahmen einer Ergonomiestudie werden verschiedene UrbANT Prototypen im Vergleich zu einem herkömmlichen Einkaufswagen bzgl. subjektiver und objektiver ergonomischen Gestaltungskriterien bewertet. Mithilfe der Studie sollen ergonomisch günstige Konzeptelemente identifiziert und Optimierungspotentiale abgeleitet werden.
In vier weiteren Studien soll insbesondere die Interaktion zwischen Fahrzeug und Nutzenden (u.a. Informationsaustausch über visuelle und/oder auditive Anzeigen, Folgeverhalten, etc.) untersucht werden. Erkenntnisse dieser Studien sollen in die Interaktionsentwicklung einfließen. Dazu gehört neben der bestmöglichen Kalibrierung der Folgefunktion (u.a. des Folgeabstands) auch die Untersuchung und Gestaltung verbaler und nonverbaler Interaktionsprinzipien. Ziel ist die Gestaltung einer sicheren und angenehmen Interaktion, die zu einer optimalen Vertrauenskalibrierung auf Seiten der Nutzenden beiträgt.
Die Studienreihe schließt mit einem abschließenden Feldtest, in dem eine ganzheitliche Erprobung der UrbANT Prototypen im Feld erfolgen soll. Hierbei sollen nicht nur einzelne Funktionskomponenten evaluiert, sondern ganzheitliche Abläufe und das Gesamterleben mit dem Produkt erhoben werden.
Interaktion mit Passantinnen und Passanten
Ein Mikromobil wird nicht nur den Nutzerinnen und Nutzern begegnen. Auf seinen Fahrten durch die Stadt, über Gehwege und öffentliche Plätze, wird das Fahrzeug vor allem auf unbeteiligte Dritte treffen. Diese Menschen haben sich nicht selbst für eine Interaktion entschieden, sondern finden sich plötzlich in Gegenwart eines autonomen Lieferfahrzeugs wieder. Auch die Perspektive dieser Passantinnen und Passanten muss in der Forschung berücksichtigt werden. Wie wirkt das Mikromobil auf sie? Wie verhalten sich verschiedenen Menschen in so einer Situation? Durch welche Interaktionsstrategien des Mikromobils können diese Begegnungen gelöst werden?
Im Projekt UrbANT wird die Interaktion mit Passantinnen und Passanten in zwei Forschungsschwerpunkten betrachtet. Der erste ist die Kollisionsvermeidung. Im Rahmen von Feldobservationen und experimentellen Laborstudien wird betrachtet, wie Passantinnen und Passanten auf autonome Mikromobile reagieren, um Interaktionskonzepte für Passiersituationen zu entwickeln. Der zweite Forschungsschwerpunkt betrifft Übergriffe auf das Mikromobil. In Feldstudien, die es bereits zu Robotern in (teil-)öffentlichen Räumen gibt, wurde wiederholt beobachtet, dass Roboter insbesondere durch Kinder schikaniert werden. Dieses Phänomen wird in der Literatur als „Robot Abuse“ bezeichnet. Solche Vorfälle, in denen das Mikromobil vorrübergehend am Weiterfahren gehindert oder sogar nachhaltig beschäftig würde, stellen sowohl für das Fahrzeug selbst als auch für eine zuverlässige Lieferung ein Risiko dar. Ziel ist es daher, in Feld- und Laborstudien mögliche Konzepte zu entwickeln und zu testen, um solche Übergriffe zu verhindern oder abzuwenden.
© Laura Platte

© Laura Platte

© Anna Abrams
UrbANT-Fahrzeugplattform
Die Fahrzeugplattform bildet die Basis aller UrbANT-Mikromobile. In ihr ist die gesamte für den autonomen Fahrbetrieb erforderliche Hardware integriert. Dies beinhaltet neben Antrieb, Fahrwerk und Fahrzeugstruktur, die Energieversorgung, Sensorik sowie Fahrzeugintelligenz. Die Integration aller Komponenten in die Plattform bedeutet, dass diese alleine fahrfähig ist. Dies bietet den Vorteil, dass die unterschiedlichen Aufbauten variabler und äußerst kostengünstig gestaltet werden können.
Wesentliche Gestaltungsgrundlagen für die Fahrplattform sind die kompakten Außenabmessungen von unter 90 x 60 cm, die in Kombination mit dem Einzelradantrieb eine hohe Wendigkeit auf engem Raum ermöglicht, sowie eine gute Hindernisüberwindung, die durch große Böschungswinkel den Einsatz in nicht-barrierefreien Umgebungen erlaubt. Dies ermöglicht ein sicheres Überwinden von Bordsteinkanten und das Befahren von unebenen und unbefestigten Strecken, wie Kopfsteinpflaster oder Wegen in Parks.
Wesentliche technische Parameter des Fahrzeugs sind:
- Kompakte Außenabmessungen: < 90 x 60 cm
- Höchstgeschwindigkeit: 6 km/h
- Reichweite & Einsatzdauer: ca. 20 km bzw. 4 h
- Hohe Zuladung: 90 kg (Aufbaustruktur + Zuladung)
- Einsetzbar in nicht-barrierefreien Umgebungen
Paketstations-, Falt- und Einkaufsaufbau
Im Projekt UrbANT werden drei unterschiedliche Aufbaumodule entwickelt, die mit der Fahrplattform kombiniert werden können. Das Institut für Kraftfahrzeug entwickelt den Paketstationsaufbau, die Deutschen Institute für Textil- und Faserforschung Denkendorf verantworten den Faltaufbau und die Firma easy2cool konzipiert den Einkaufsaufbau.
Paketstationsaufbau
Die durch das Institut für Kraftfahrzeuge entwickelte Paketstation dient dem Transport von Kurier-, Express- und Paketsendungen auf der letzten Meile und im innerstädtischen Direktversand. Je nach Anwendungsfall kann die Paketstation für den Paketversand in innerstädtischen Mikrodepots bzw. an einem Übergabepunkte von einem Lieferwagen beladen werden oder als Ergänzung zu Fahrradkurieren Kurier- und Expresssendungen innerstädtisch von A nach B transportieren. Damit werden auch same day Lieferungen für den lokalen Einzelhandel möglich, der somit eine Alternative zum Onlineshopping bieten kann.
Trotz der geringen Grundfläche von weniger als 90 x 60 cm kann die Paketstation zehn Pakete in der Größe eines Aktenordners transportierten. Um flexibel auch größere Pakete zu transportieren, können mehrere übereinanderliegende Fächer miteinander kombiniert werden.
Neben der Lieferung von Päckchen und Paketen an die Haustür – jeweils zur vom Kundinnen und Kunden gewünschten Tag- und Nachtzeit – kann der UrbANT Paketstationsaufbau auch genutzt werden, um Retouren aufzugeben. Die Aufgabe der Päckchen erfolgt ebenso wie die Entnahme über das Fahrzeugseitige HMI oder die neu speziell gestaltete Smartphone-App.
Faltaufbau
Die DITF entwickeln verschiedene Strategien für die Herstellung einzelner Komponenten des Aufbaus. Um die Leichtbauanforderungen zur Erhöhung der Nutzlast des Fahrzeugs zu erfüllen, wurde ein teleskopierbarer Aufbau in Faserverbund-Sandwich-Bauweise konzipiert. Die Stabilität des Aufbaus ist durch die Verwendung eines relativ hochfesten GFK-Bodenmoduls, das im „Vacuum Assisted Resin Infusion“ (VARI) Verfahren hergestellt, gewährleistet. Das Bodenmodul integriert die Datenverarbeitung- und Steuerelektronikmodule, die für die Nutzerkommunikation erforderlich sind.
Darüber hinaus wurde in Zusammenarbeit mit dem Institut für Textil- und Fasertechnologien (ITFT) der Universität Stuttgart ein innovatives Herstellungskonzept basierend auf dem Tapelegeverfahren für ein carbonfaserverstärktes thermoplastisches biegsames Rolltor als Beladungsöffnung des UrbANT entwickelt. Das Rolltor gewährleistet das ergonomische Be- und Entladen des Gepäcks in den UrbANT. Das Deckmodul, das ebenso mittels VARI-Verfahren hergestellt wurde, integriert die Kameras, die das autonome Fahren unterstützen, sowie die Komponenten zur Benutzerinteraktion wie Display, Mikrofon und Lautsprecher.
Zudem ermöglicht die im Projekt entwickelten, neuartigen Scherentischmechanismus stufenlose Höhenverstellung des Aufbaus. Dadurch kann das Nutzvolumen des UrbANT entsprechend der Größe der Nutzlast variiert werden.
Einkaufsaufbau
Die easy2cool GmbH ist aufgrund ihrer Expertise im Bereich der Passivkühlung und des Lebensmitteltransports für die Konzeption und Ausgestaltung des Einkaufsaufbaus verantwortlich. Ziel ist es, einen gängigen Wareneinkaufskorb innerhalb eines Zeitfensters von 4 bis 6 Stunden lebensmittelgerecht vom Ort des Einkaufs bzw. der Lagerung zur Wohnung des Endnutzers zu befördern. Durch zwei von einander abgetrennte Fächer können schwere Getränkekisten von frischen und tiefgekühlten Lebensmitteln separiert werden.
Isoliersysteme für den Kühlversand bestanden in der Regel aus aufgeschäumtem Polystyrol (EPS) und Kunststoff. Auf Grund des hohen Energiebedarfs bei der Herstellung und der enorm problematischen Entsorgung entsteht eine immense Belastung für Klima, Wasser und Böden. Die Lösung: ein neuartiges, nachhaltiges Isolationsmaterial, welches gemeinsam mit der TU Dresden (Institut für Naturstofftechnik) im Rahmen eines ZIM FuE-Kooperationsprojektes entwickelt wurde. Dieses nachhaltige Isolationsmaterial aus Zellulose wird zerfasert, anschließend in Mattenform gebracht wird in den Aufbau integriert. Unterstützend werden hier in Klimakammern diverse Testszenarien simuliert, um eine möglichst effektive und effiziente Kühllösung zu entwickeln. Die Entwicklung geschieht unter Berücksichtigng äußerer Parameter wie der festgelegten Größe des UrbANT-Fahrzeugs sowie der anderen unterzubringenden Komponenten wie Mensch-Maschine Schnittstellen.
Exterieur Design
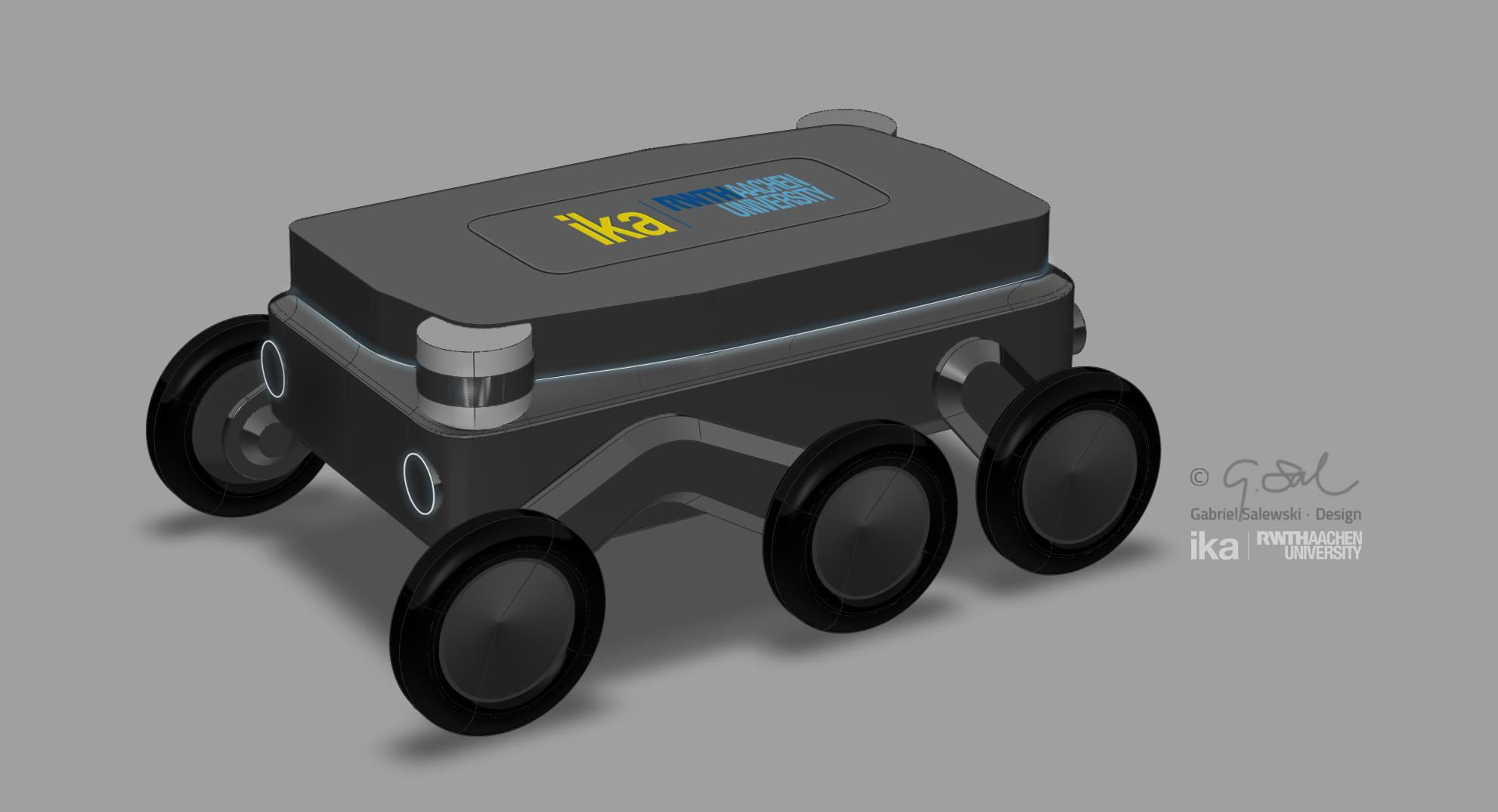
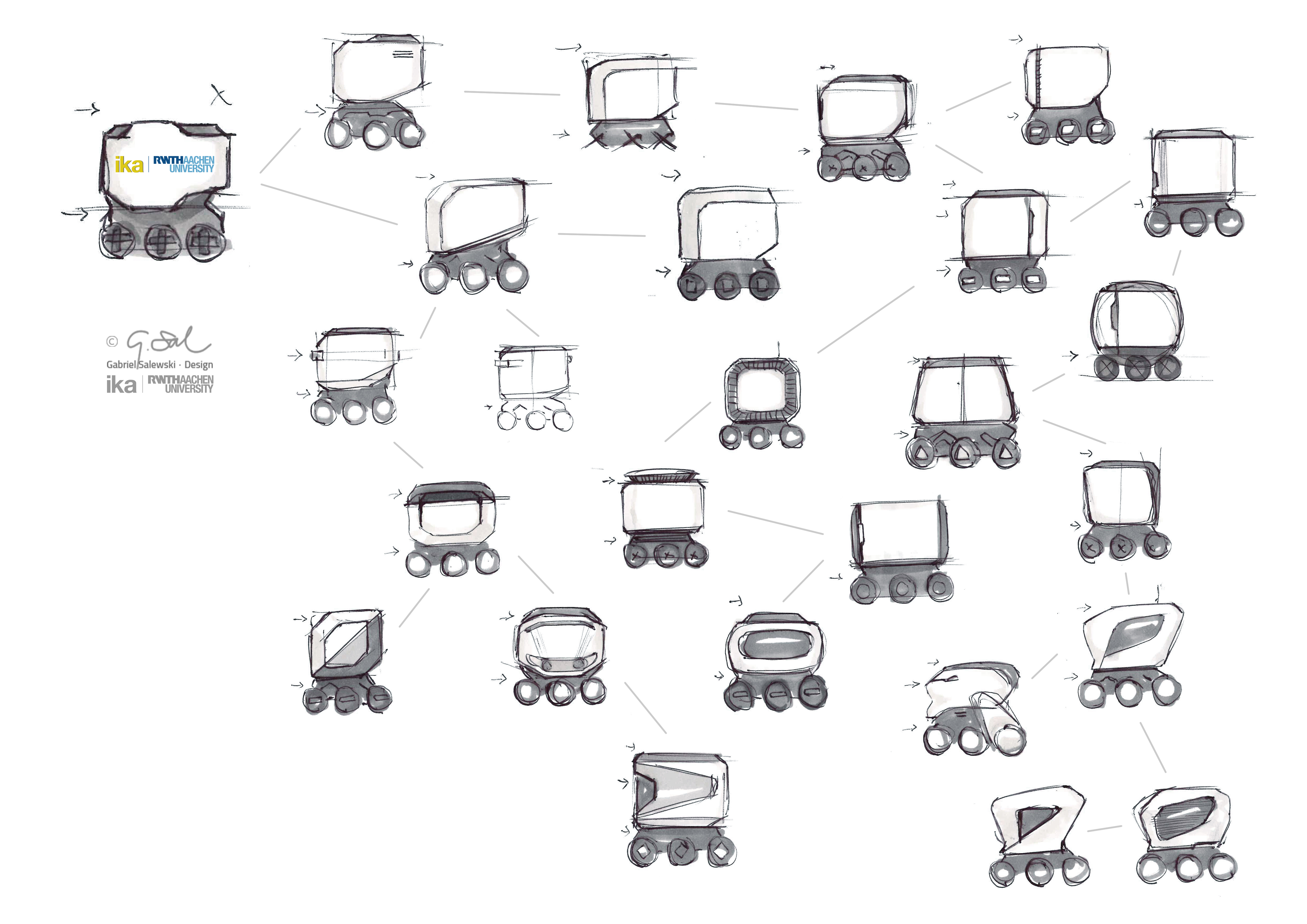
Mit der Vorstellung des Exterieur-Designs erhält UrbANT erstmals sein Gesicht. Die Transportation Designer des ika haben zusammen mit den Projektpartnerinnen und partnern seit dem Sommer 2019 das Design der Plattform sowie der Einkaufs-, Falt- und Paketstationsaufbauten entwickelt, das kontinuierlich über den Formenbau zum fertigen Fahrzeug weiter wächst.
Der Designprozess begann mit einem weißen Blatt Papier. In der Konzeptphase entstanden Skizzen, um verschiedene Ideen zu visualisieren und ausgewogene Proportionen zu finden.
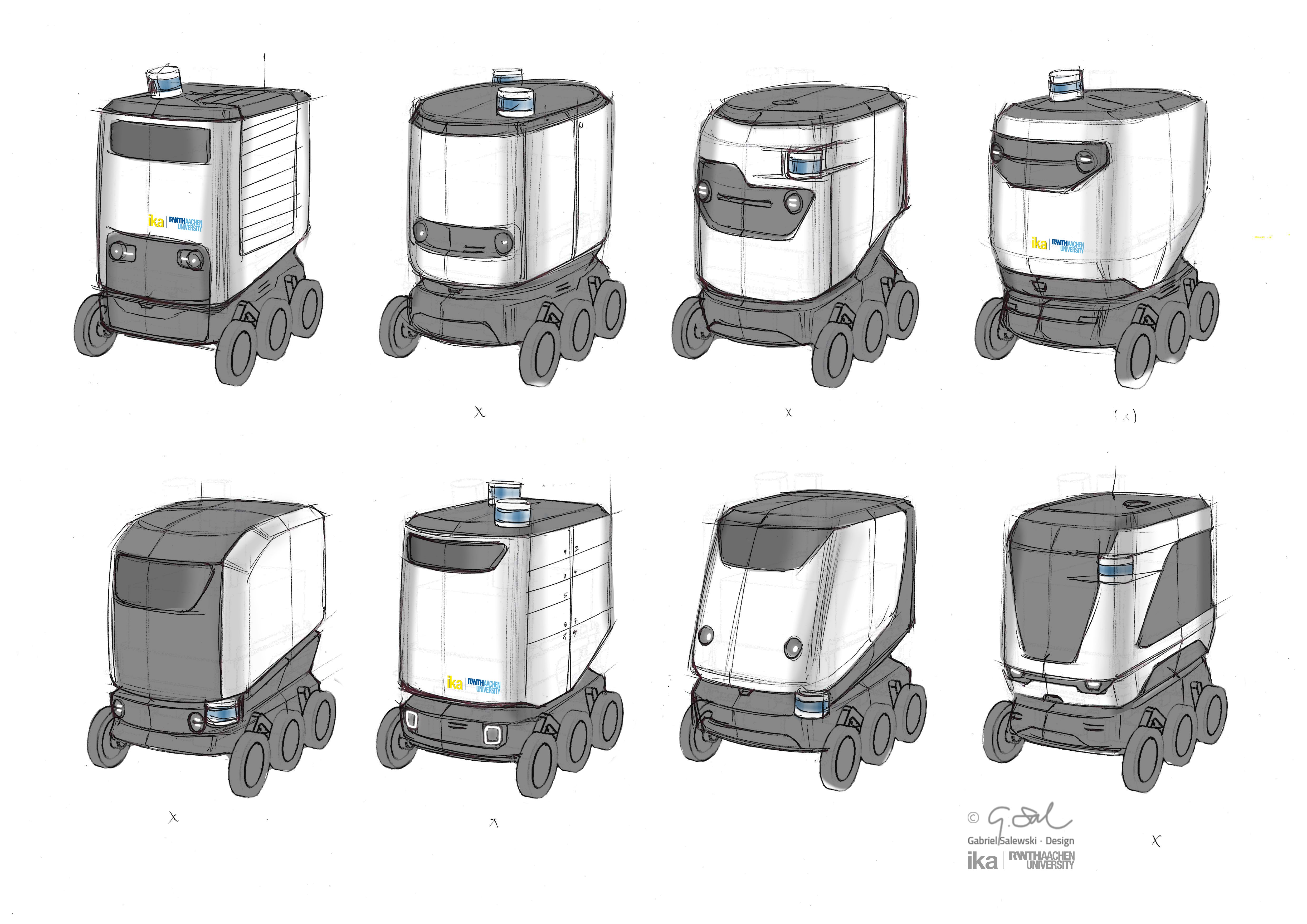
In Abstimmung mit dem Konstruktionsprozess entwickelte sich eine detailliertere Formensprache, basierend auf den vorgegebenen Grundabmessungen des Fahrzeuges. Erste 2D-Renderings entstanden zunächst am PC, um einen realistischen Eindruck des Mikromobils zu erhalten und Design-Tendenzen herauszuarbeiten. Der Grad der Detailtiefe wuchs in Abstimmung mit den Konsortiumspartnerinnen und -partnern für alle drei Aufbauten und unter Berücksichtigung von HMI, Package, Struktur und Sensorik.
Durch den Design Freeze im Herbst 2020 wurde die Festlegung der weiteren Designausrichtung definiert und mit der detaillierten Exterieur-Flächengestaltung begonnen. In dieser Phase entstand die komplette optische Außenhaut des UrbANT. Die gestalteten Exterieurflächen werden aktuell in das Gesamtfahrzeugmodell eingearbeitet. Parallel entsteht ein erster 1:1 Musteraufbau zur Beurteilung optischer Flächen und ausgewählter Exterieur-Farben. In mehreren Iterationsschleifen wird das Exterieur Design in den nächsten Monaten finalisiert, um anschließend an den fahrbaren UrbANT-Prototypen sichtbar zu werden.





Automatisierungsfunktionen
Innerhalb des Vorhabens erfolgt die Entwicklung und Integration einer Folgefunktion, sowie der autonomen Fahrt des Mikromobils in urbanen Umgebungen. Mittels der zu entwickelnden Folgefunktion soll das Mikromobil in die Lage versetzt werden, Nutzenden zu folgen (z.B. Einkäufe nach Hause fahren) und dabei Umgebungsverkehr aktiv auszuweichen. Mit der Funktion zur autonomen Fahrt wird das Mikromobil in der Lage sein, Strecken alleine zu zurückzulegen. Hierbei erfasst es durch die eingesetzte Sensorik vollständig seine Umgebung, kann somit z.B. Hindernisse wie Personen wahrnehmen und diesen ausweichen.
Die Nutzendenfolgefunktion umfasst hierbei Subkomponenten bestehend aus einer Detektionsfunktion zur Erkennung der Nutzerinnen und Nutzer, einer Trackingfunktion zur Verfolgung der Nutzenden und deren eindeutiger Wiedererkennung im Personenverkehr, sowie die Integration in die Bewegungsbahnplanung mit Kollisionsvermeidung.
Zur Herstellung der Fahrzeugautonomie erfolgt die Implementierung von Funktionen zur Umgebungskartierung und Lokalisierung unter Einbezug heterogener Sensordaten. Weiterhin erfolgt mittels Verfahren der semantischen Segmentierung die Klassifikation von u.a. befahrbaren Bereichen. Die Routen- und Bewegungsbahnplanung des Roboters erfolgt innerhalb einer globalen Routenfindung (u.a. wird hier auf OSM-Daten zurückgegriffen) und der lokalen Trajektorienplanung, welche auch die Kollisionsvermeidung integriert. Eine Zustandsmaschine kombiniert diese Komponenten zur Ausführung von Fahraufträgen.
Die in die Fahrplattform integrierten Sensorsysteme setzten sich hierbei u.a. aus Mono-Kameras, Stereo-Visionsystemen, Inertiale Messeinheiten (IMUs), 3D-Lidarsensoren und Ultraschallsensoren.

![[Rendering: HMI-Konzept]](../images/projekt/17_2020_07_20_eHMI_Design_front_5_-_CamerasReflektoren_V3_-_1.jpg)
Human-Machine Interaction
Ein wichtiger Aspekt der nutzendenzentrierten Transportplattform ist die Entwicklung einer zugeschnittenen Mensch-Maschine-Interaktion. Das gesamtheitliche HMI Konzept umfasst die Interaktion mit den Primärnutzenden, die das Fahrzeug ordern und on-demand nutzen, den Sekundärnutzenden, die Stakeholder in der Gestaltung des Fahrzeugs sind und die Betriebsbedingungen verantworten sowie mittelbar beteiligten Dritten und Passantinnen und Passanten, denen das Fahrzeug auf dem gemeinsamen Nutzungsraum Gehweg begegnet.
Ziel der Forschung und Entwicklung ist die Gestaltung eines intuitiven Systems, das zur Nutzung motiviert und dabei eine niedrige Einstiegshürde für die neue Technologie darstellt.
Um auch älteren Menschen eine Plattform und Alltagshilfe anzubieten, lässt sich das Fahrzeug bequem sowohl mit der UrbANT App jedoch auch alternativ per Touchscreen-Bedienung direkt am Fahrzeug steuern. Der Fokus liegt hierbei auf der Gestaltung einer intuitiven und nutzerfreundlichen Bedienschnittstelle, die die technische Komplexität reduziert und besonders älteren Menschen Berührungsängste nimmt.
BackEnd
neomesh bringt mit der webbasierten Softwarelösung CLAC Citylogistik eine Kommunikationszentrale bzw. Managementoberfläche in das Projekt ein, über die verschiedene Anspruchsgruppen auf die UrbANT zugreifen können und entwickelt diese im Rahmen des Projekts weiter.
Hierbei sind Nutzer*innengruppen mit unterschiedlichen Rechten und Funktionen zu differenzieren. Unternehmenskund*innen wie Händlerinnen und Händler haben neben der Beauftragung von Transporten auch umfangreiche Möglichkeiten des Flottenmanagements ihrer UrbANT. Servicetechnikerinnen und Servicetechniker haben für Wartungs- und Notfallzugriffe die Möglichkeit zur Teleoperation, einem direkten, hardwarenahen Zugriff auf einzelne Fahrzeuge durch eine Remote-Verbindung (z.B. VNC, RDP, WebRTC). Endanwenderinnen und Endanwender haben wiederum die Möglichkeit der Registrierung und die Einsicht in Nutzungs- und Rechnungsdaten. Beauftragte Dienstleistungen werden durch automatisch erzeugte Abrechnungen fakturiert und digital vom Server versendet.
Der Datenaustausch zwischen CLAC und den UrbANT wird über eine Software-Schnittstelle (Vehicle API) als Live-Kommunikationskanal realisiert. Jeder UrbANT sendet regelmäßig seinen aktuellen Status - auch Heartbeat genannt - an die API. Dieser Heartbeat enthält Positionsdaten, Status und aktuelle Auslastung der Fahrzeuge. Die UrbANT erhalten im Gegenzug Transportaufträge und können zu verschiedenen Geo-Positionen dirigiert werden. Ein Positionswechsel ohne Transportauftrag hat den dem Zweck einer technischen Analyse oder dem Einnehmen einer idealen Warteposition bis zur nächsten Beauftragung. Die Warteposition ist sowohl von Statistiken ausgewerteter Transporte als auch von den Bedürfnissen der Anwenderinnen und Anwender abhängig.
Des Weiteren bietet das BackEnd die Option eines „digitalen Zwillings“. Hier kann das Fahrzeug digital veranschaulicht und in seine Einzelteile zerlegt werden. Wartungen werden hierdurch erleichtert, da Einzelteilspezifikationen hinterlegt sind und bei Reparaturbedarf Ersatzteile schneller bereitgestellt werden können. Durch die Auswertung von Betriebsdaten wie z.B. zurückgelegte Kilometer, können Fahrzeugkomponenten bereits vor Verschleiß gewartet und ersetzt werden (Predictive Maintenance).
Zeitplan
Das Projekt UrbANT hat eine Laufzeit von 36 Monaten. Offizieller Projektstart war der 15. Mai 2019. Es endet am 14. Mai 2022.
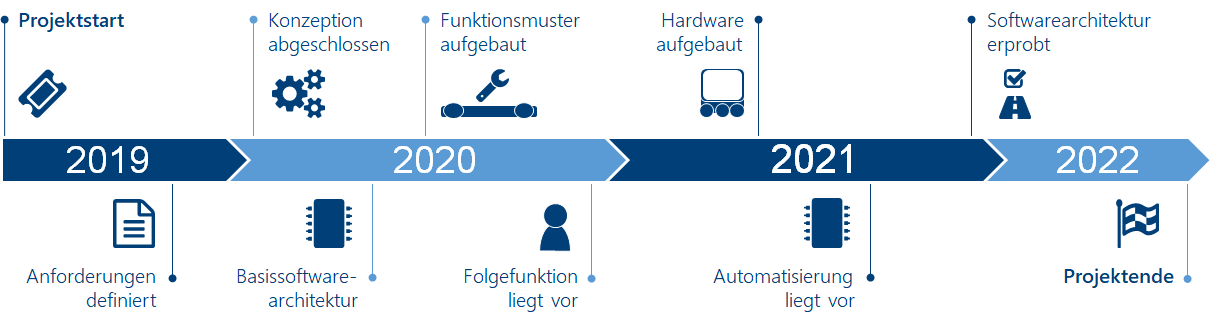
Im Projektverlauf werden sieben iterative Studien mit Nutzenden und Passantinnen und Passanten durchgeführt und die Ergebnisse in die technische Weiterentwicklung integriert. Zum Projektende findet darüber hinaus ein ausführlicher Feldtest statt.
