")
")
![[Image: UrbANT Skizzen]](../images/titelbild.jpg)
Projekt
![[Bild: Konzept des Transporters]](../images/projektvorstellung.jpg)
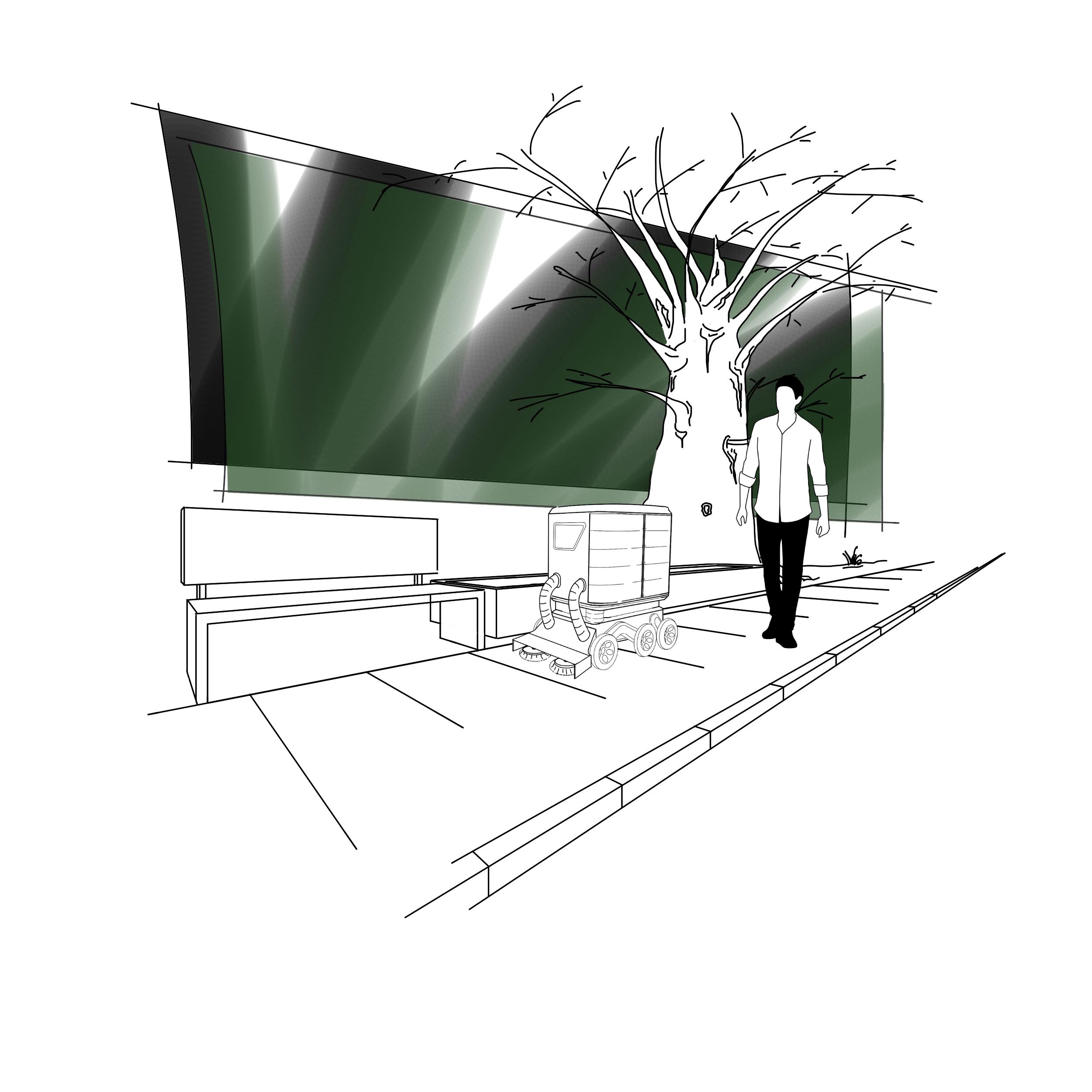
Mit dem Fahrrad, zu Fuß und mit öffentlichen Verkehrsmitteln können in Städten viele Wegstrecken bequem zurücklegt werden. Müssen jedoch große oder schwere Güter transportiert werden, erscheint das eigene Auto oftmals unverzichtbar.
Im Forschungsprojekt UrbANT, dessen Akronym die Entwicklung einer urbanen, automatisierten, nutzerorientierten Transportplattform beschreibt, konzipieren, fertigen und erproben zehn Forschungseinrichtungen und Industriepartner aus Deutschland drei elektrisch angetriebene Mikromobile, die mit bis zu 6 km/h auf Gehwegen fahren. Die UrbANT werden einerseits zu Fuß Gehenden eine komfortable Beförderung großer und schwerer Güter erlauben und dabei sicher, zuverlässig und intuitiv mit den Nutzenden interagieren sowie ihnen automatisch folgen. Andererseits werden sich die UrbANT autonom fortbewegen, um eigenständig zu Aufträgen zu gelangen oder als autonomes Liefersystem auf der letzten Meile zu fungieren. Drei verschiedene Aufbaumodule ermöglichen den Transport unterschiedlichster Güter, von Päckchen über sperrige Koffer bis hin zu Lebensmitteln, während die Fahrzeuge mittels neu entwickeltem HMI-System mit den Nutzenden aber auch mit Passantinnen und Passanten kommunizieren.
Alle Informationen zum Projekt und seinen Forschungsthemen, aktuellen News und Veröffentlichungen sowie eine Übersicht aller Projektmitwirkenden finden Sie auf dieser Internetseite.
News
Hier finden Sie die aktuellsten News rund um das Projekt UrbANT. Zu weiteren Artikeln gelangen Sie über den untenstehenden Link.

Abschlussevent
Nach drei spannenden Jahren fand Ende November das Final Event unseres Forschungsprojektes UrbANT am ika statt.
Dienstag, 06. Dezember 2022
Roboter und Gesellschaft – Finalisierung der Technikfolgenabschätzung und Technologietransferanalyse
Die Verbreitung neuer Technologien geht immer mit gesellschaftlichen Veränderungen einher. Im Projekt UrbANT werden potenzielle gesellschaftliche Effekte von Lieferrobotern aus zwei Perspektiven beleuchtet.
Mittwoch, 23. November 2022
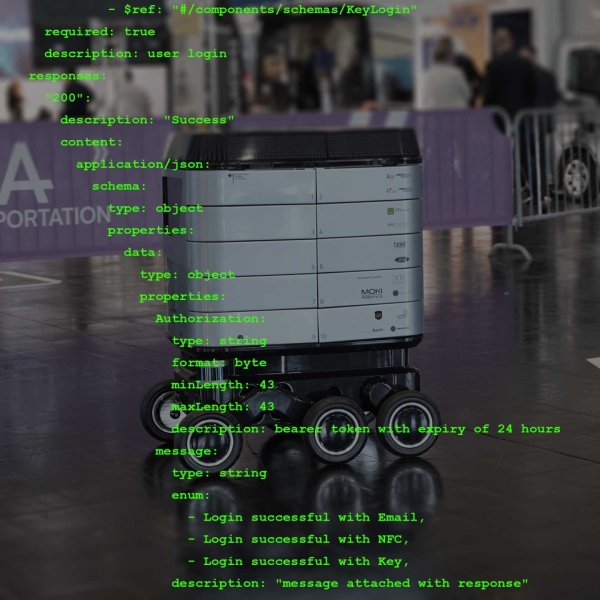
API-Entwicklung für Smartphone-App und Paketaufbau
In der aktuellen Projektphase hat sich die neomesh GmbH insbesondere mit der Weiterentwicklung der API sowie der technischen Integration beschäftigt. Die API wurde nach OpenAPI-Standard (Swagger) dokumentiert.
Freitag, 14. Oktober 2022
Veröffentlichungen
Hier finden Sie die aktuellsten Veröffentlichungen zum Projekt UrbANT. Zu einer Übersicht aller Veröffentlichungen gelangen Sie über den untenstehenden Link.
Investigation of different communication strategies for a delivery robot: the positive effects of humanlike communication styles 08.08.2021 – 12.08.2021
30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Vancouver, Kanada,Autor*innen: P.S.C. Dautzenberg (M. Sc.), Institut für Kraftfahrzeuge (ika); Dr. phil. G.M.I. Voß, Institut für Kraftfahrzeuge (ika); Dr. phil. S. Ladwig, Institut für Kraftfahrzeuge (ika); Univ.-Prof. Dr. rer. nat. A. M. Rosenthal-von der Pütten, Lehrstuhl für Technik und Individuum (iTec)
Im Rahmen der 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN) präsentierte und diskutierte das ika die Ergebnisse einer Onlinestudie im Rahmen eines Vortrags sowie einer Publikation. Ziel der Studie war die subjektive Evaluation N = 9 verschiedener Kommunikationsstrategien hinsichtlich der nutzerseitig wahrgenommenen Kompetenz, Wärme, Komforts und Präferenz. Bezüglich der Kommunikationsstrategien wurde u.a. der Grad des Anthropomorphismus, das Geschlecht sowie die Modalität variiert.
A Theoretical and Empirical Reflection on Technology Acceptance Models of Autonomous Delivery Robots 09.03.2021 – 11.03.2021
ACM/IEEE International Conference on Human-Robot Interaction (HRI), Boulder, Colorado, USAAutor*innen: Anna Abrams, Pia Dautzenberg, Carla Jakobowsky, Stefan Ladwig, Astrid Rosenthal-von der Pütten
In diesem Artikel werden aktuelle Technikakzeptanzmodelle, die den Fokus auf Nutzungsszenarien legen, vor dem Hintergrund autonomer Liefermodelle hinterfragt. Die Autorinnen und Autoren entwickeln das Konzept der Existenzakzeptanz (Existence Acceptance), das die Technikakzeptanz von zufällig anwesenden Personen betrachtet. Das Model wird in einer Online-Studie empirisch getestet und theoretisch diskutiert.
In this paper, current technology acceptance models with their focus on a use scenario are questioned for autonomous delivery models. The authors develop the concept of Existence Acceptance (EA) that addresses the technology acceptance of incidentally co-present persons. The model is empirically tested in an online study and theoretically discussed.
User-oriented transport solutions: An ergonomic investigation of two novel concepts 25.07.2021 – 29.07.2021
12th International Conference on Applied Human Factors and Ergonomics (AHFE 2021), New York, USAAutor*innen: Pia Dautzenbeg, Gudrun Voß, Lining Wand, Martin Reske, Christopher Brockmeier, Stefan Ladwig
Im Rahmen der 12th International Conference on Applied Human Factors and Ergonomics (AHFE 2021) wird das ika die im August 2020 durchgeführte Ergonomiestudie im Rahmen eines Vortrags sowie einer Publikation präsentieren und im wissenschaftlichen Plenum diskutieren. Ziel der Studie war die Evaluation subjektiver und objektiver Ergonomie bei der Nutzung von verschiedenen UrbANT Prototypen zur Identifikation ergonomisch günstiger Konzeptelemente und Ableitung von Optimierungspotentialen.
The ika will present the ergonomics study conducted in August 2020 at the 12th International Conference on Applied Human Factors and Ergonomics (AHFE 2021). The aim of the study was to evaluate subjective and objective ergonomics during the use of different UrbANT prototypes in order to identify ergonomically favorable concept elements and to derive optimization potentials.
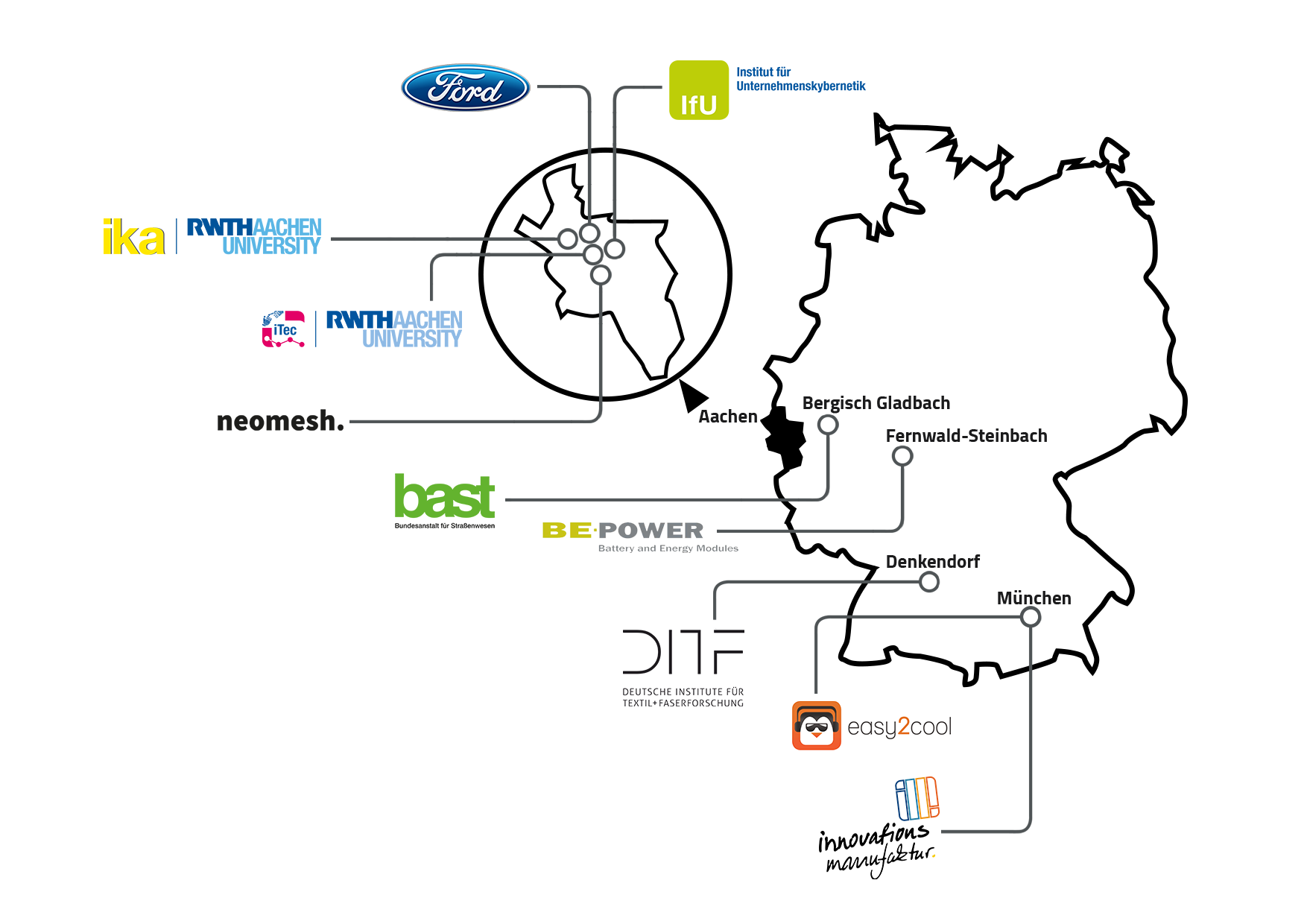
Partner
Das UrbANT-Konsortium besteht aus zehn deutschen Forschungseinrichtungen und Industriepartnern. Detaillierte Informationen über die Partner und ihre Rollen im Projekt erhalten Sie durch Anklicken der Logos sowie über den untenstehenden Link.